251
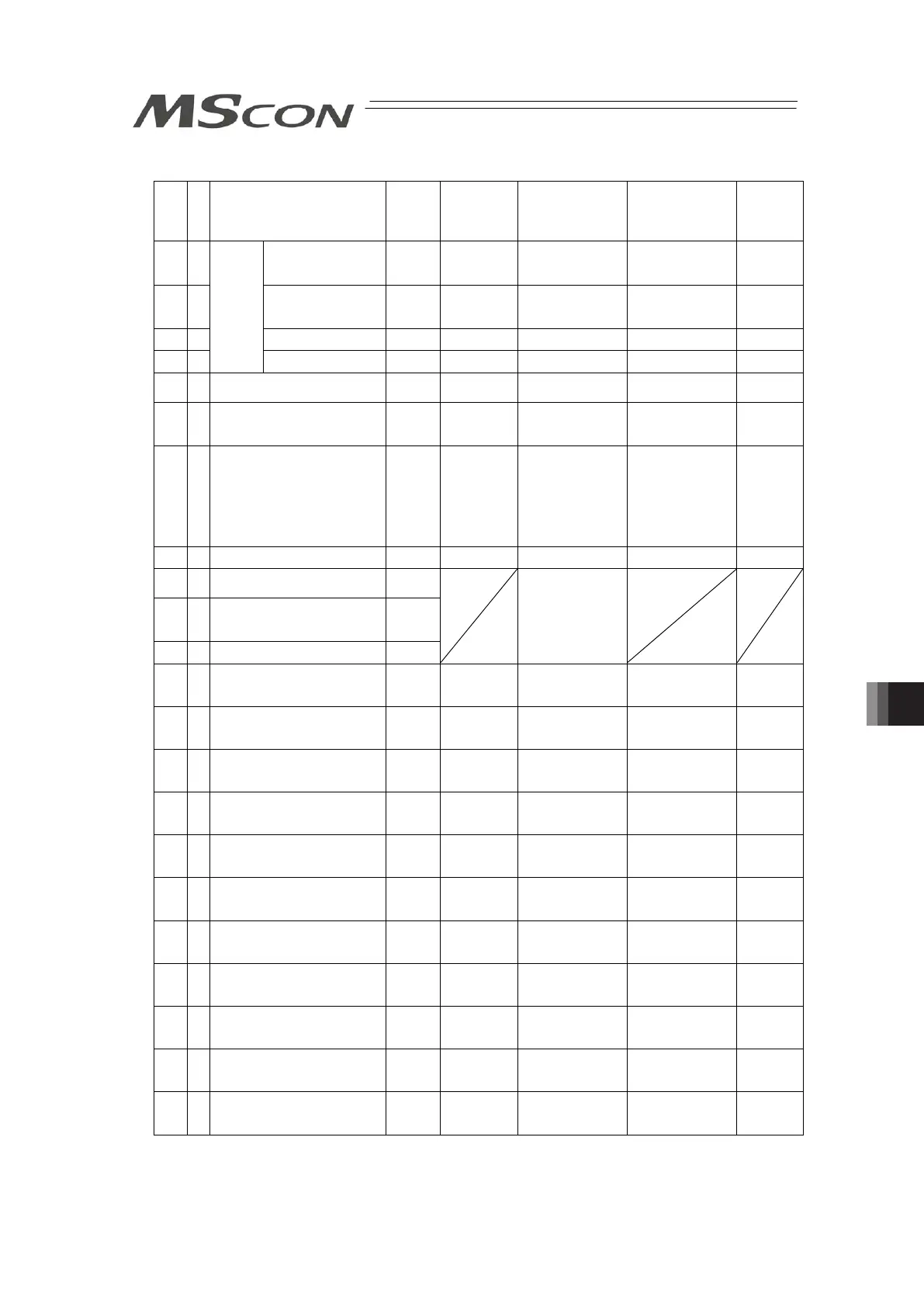
Parameter List (continued)
No.
Category
Name Symbol
Unit
(Note 1)
Input Range
Default factory
setting
Relevant
sections
105 C
Damping
Characteristic
Coefficient 1
DC11 - 0 to 1000 10
4.2
106 C
Damping
Characteristic
Coefficient 2
DC21 - 0 to 1000 1000
4.2
107 B Natural Frequency NP01 1/1000Hz 500 to 30000 10000
4.2
108 C
Vibration suppress
parameter set 3
Notch Filter Gain NFG2 - 1 to 20000 9990
4.2
109 B
Default Vibration Suppress
No.
CTLF - 0 to 3 0
4.2
110 B Stop Method at Servo OFF FSTP -
0: Rapid stop
1: Deceleration to
stop
0
4.2
112 B Monitoring Mode Selection FMNT -
0: Unused
1: Monitor
Function 1
2: Monitor
Function 2
3: Monitor
Function 3
1 7.2 [59]
113 B Monitoring Period FMNT msec 1 to 100 1 7.2 [60]
117 B
Automatic Loadcell
Calibration at Start
FFRC
118 B
Pressing Operation without
Completion of Loadcell
Calibration
FFRC
119 B Loadcell Calibration Time CLBT
For future
extension use.
Unavailable
120 C Servo Gain Number 1 PLG1 - 0 to 31
In accordance
with actuator
(Note 2)
7.2 [5]
7.3
121 C Feed Forward Gain 1 PLF1 - 0 to 100
In accordance
with actuator
(Note 2)
7.2 [41]
122 C
Velocity Loop Proportional
Gain 1
VLG1 - 1 to 27661
In accordance
with actuator
(Note 2)
7.2 [21]
7.3
123 C Velocity Loop Integral Gain 1 VLT1 - 1 to 217270
In accordance
with actuator
(Note 2)
7.2 [22]
7.3
124 C Torque Filter Time Constant 1 TRF1 - 0 to 2500
In accordance
with actuator
(Note 2)
7.2 [23]
7.3
125 C
Current Control Width
Number 1
CLP1 0 to 4
In accordance
with actuator
(Note 2)
7.2 [35]
7.3
126 C Servo Gain Number 2 PLG2 - 0 to 31
In accordance
with actuator
(Note 2)
7.2 [5]
7.3
127 C Feed Forward Gain 2 PLF2 - 0 to 100
In accordance
with actuator
(Note 2)
7.2 [41]
128 C
Speed Loop Proportional
Gain 2
VLG2 - 1 to 27661
In accordance
with actuator
(Note 2)
7.2 [21]
7.3
129 C Speed Loop Integral Gain 2 VLT2 - 1 to 217270
In accordance
with actuator
(Note 2)
7.2 [22]
7.3
130 C Torque Filter Time Constant 2 TRF2 - 0 to 2500
In accordance
with actuator
(Note 2)
7.2 [23]
7.3
Note 2: The setting values vary in accordance with the specification of the actuator. At shipment, the
parameters are set in accordance with the specification.