Chapter 3 Operation
POWER CON
PCON-CB/LC
80
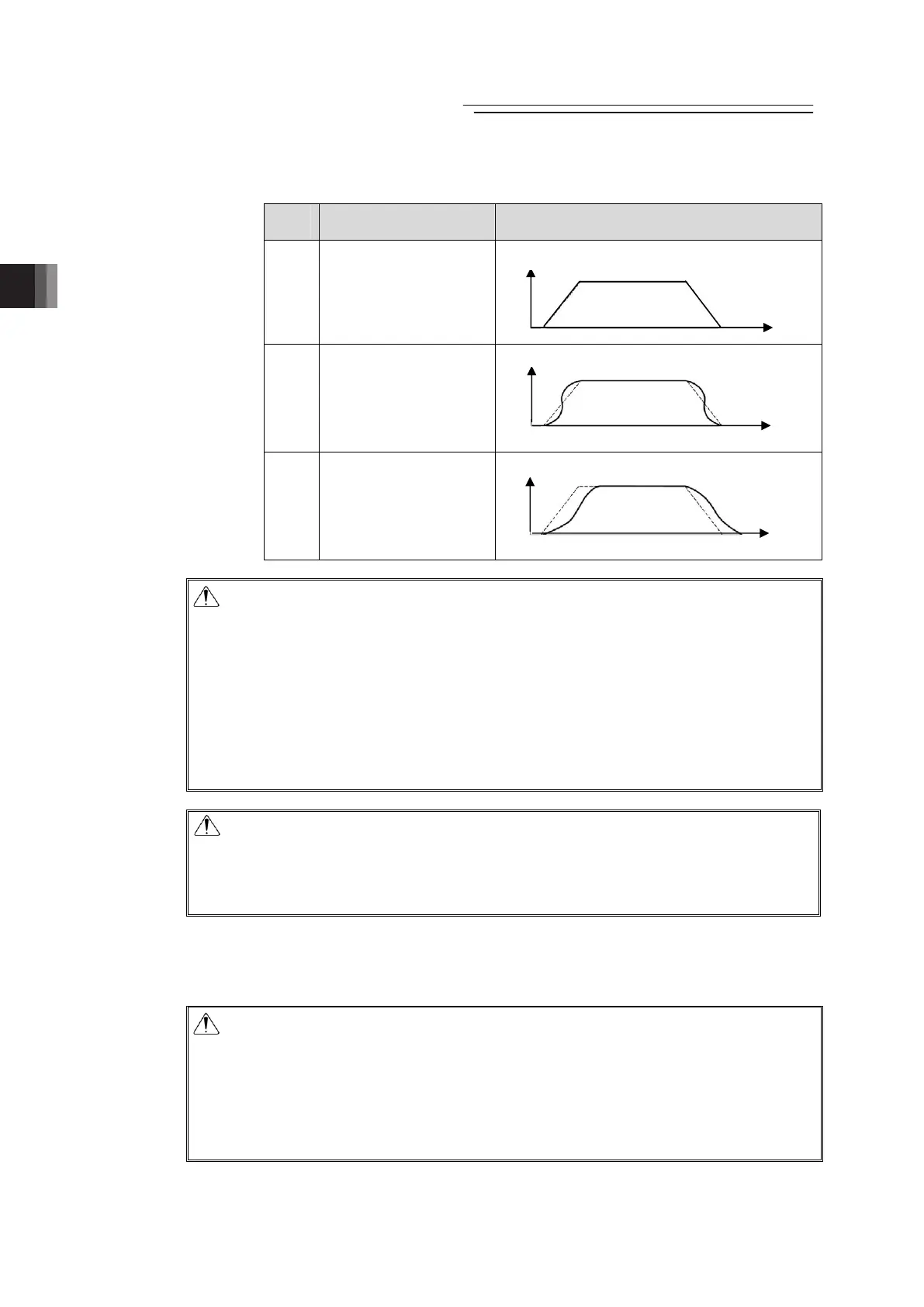
11) Acceleration / deceleration mode ······Select a proper acceleration/deceleration pattern
depending on the load.
Set
Value
Acceleration/
Deceleration Pattern
Operation
0 Trapezoid
1 S-motion
(Refer to Caution at
S-shaped Motion)
Set the S-motion rate with parameter No.56.
2 First-Order
Lag Filter
Set the delay time constant with parameter No.55.
Caution at S-shaped Motion:
1) Since it requires a speed change during the operation, even if having the position
command or direct command that S-shaped motion is set while the actuator is moving,
S-shaped motion control cannot be performed and will be the trapezoid control.
Make sure to make a command while the actuator is stopped.
2) S-shaped motion control is invalid in the index mode of the rotary actuator. It will be the
trapezoid control even if S-shaped acceleration/deceleration control is indicated.
3) Do not use S-shaped acceleration/deceleration control if the setting of the acceleration
time or the deceleration time exceeds 2 seconds. It will not provide the right operation.
4) Do not pause on the move during acceleration or deceleration. It will change the speed
(acceleration) and may cause a danger.
Caution on First-Order Lag Filter :
Even if the position command or direct value command is conducted with first-order lag
filter being set while the actuator is operated in order to have a speed change during an
operation, it will not make first-order lag filter control, but will make trapezoid control.
Make sure to issue the command while the actuator is stopped.
12) Incremental ··········· Set to 1 for pitch feed (relative movement = incremental feed).
The value set for the position in 1) indicates the pitch feed distance.
With the value set to 0, positioning is defined to the position in 1)
based on the absolute coordinate system.
Caution: In the pitch feed, do not perform a command with a pitch smaller than the
minimum encoder resolution (lead/encoder pulse number) or that less than
positioning accuracy repeatability.
There would be no deviation to occur even with the command because it is
an operation command to the same position as the positioning complete
condition, but the positioning control cannot be performed properly.
When solenoid valve mode 2 is selected, set this to 0. Setting this to 1 causes
the position data error to occur.
Time
Velocity
Time
Velocity
Time
Velocity
 Loading...
Loading...










