Goodrive300-LIFT series inverter Function parameters
-43-
Detailed instruction of parameters
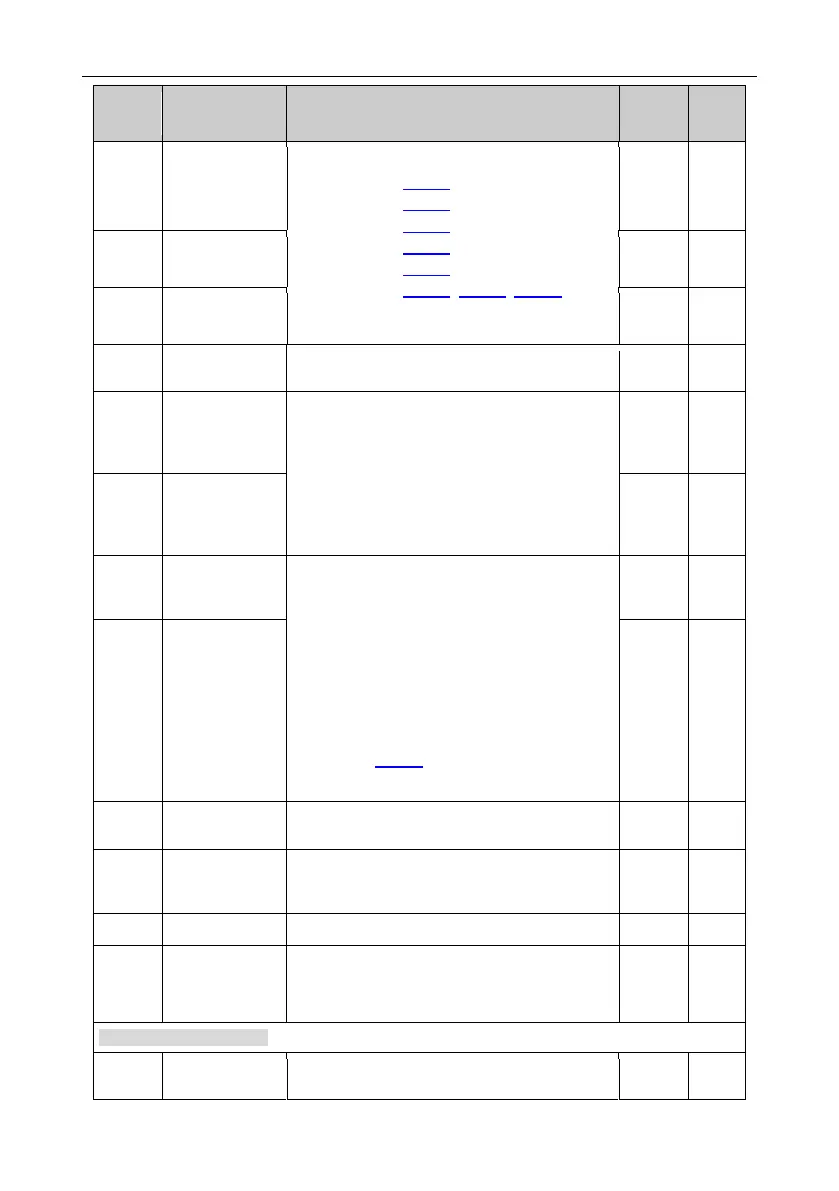
Speed loop
proportional gain
2
different loads to meet various demands.
Setting range of P03.00: 0.0–200.0
Setting range of P03.01: 0.000–10.000s
Setting range of P03.02: 0.00Hz–P03.05
Setting range of P03.03: 0.0–200.0
Setting range of P03.04: 0.000–10.000s
Setting range of P03.05: P03.02–P00.04 (max.
output frequency)
Speed loop
integral time 2
0–8 (corresponds to 0–2
8
×125 μs)
Compensation
coefficient of
electromotion
slip
Slip compensation coefficient is used to adjust
the slip frequency of the vector control and
improve the speed control accuracy of the
system. Adjusting the parameter properly can
control the speed steady-state error.
Setting range: 50%–200%
Compensation
coefficient of
braking slip
Current loop
percentage
coefficient P
Note:
1. These two parameters adjust the PI
adjustment parameter of the current loop which
affects the dynamic response speed and control
accuracy directly. Generally, keep the default
values.
2. Only applicable to the vector control mode 0
without PG (P00.00=0).
Setting range: 0–20000
Current loop
integral
coefficient I
0.0–200.0% (motor rated current)
Emergency
operation torque
upper limit
0.0–200.0% (motor rated current)
Torque boost to the output voltage for the

 Loading...
Loading...
