will run at over-excitation, which may
cause increased output current and
motor overheating, thus decreasing the
efficiency.
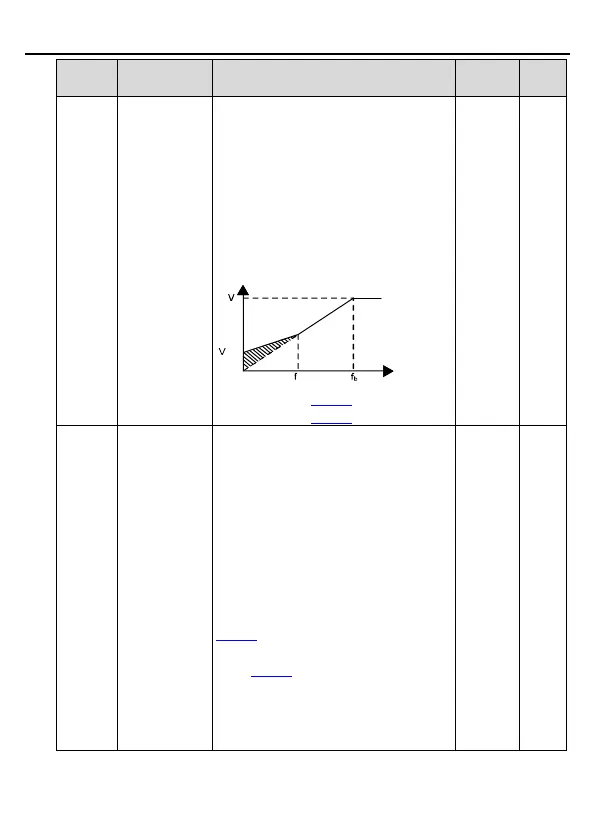
When torque boost is set to 0.0%, the
inverter uses automatic torque boost.
Torque boost cut-off threshold: Below this
frequency threshold, torque boost is
valid; exceeding this threshold will
invalidate torque boost.
The function code is used to compensate
for the motor rotating speed change
caused by load change in the space
voltage vector mode, and thus improve
the rigidity of the mechanical
characteristics of the motor. You need to
calculate the rated slip frequency of the
motor as follows:
△ f=f
b
-n*p/60
Of which, f
b
is the rated frequency of the
motor, corresponding to function code
P02.01. n is the rated rotating speed of
the motor, corresponding to function
code P02.02. p is the number of pole
pairs of the motor. 100.0% corresponds
to the rated slip frequency △ f of the
motor.
Setting range: 0.0–200.0%

 Loading...
Loading...

