JAKA Zu
®
7 - V1.1 26
5 Safety-related Functions and Interfaces
5.1 Safety Functions
The robot is equipped with a range of built-in safety-related functions that limit the movement of the robot
joint and robot Tool Center Point (TCP). TCP actually refers to the center point of the output flange with the
addition of the TCP offset.
The limiting security-related functions are:
Minimum and maximum angular joint position
Maximum angular joint speed
Planes in Cartesian space limiting the position of the robot TCP
Maximum speed of robot TCP
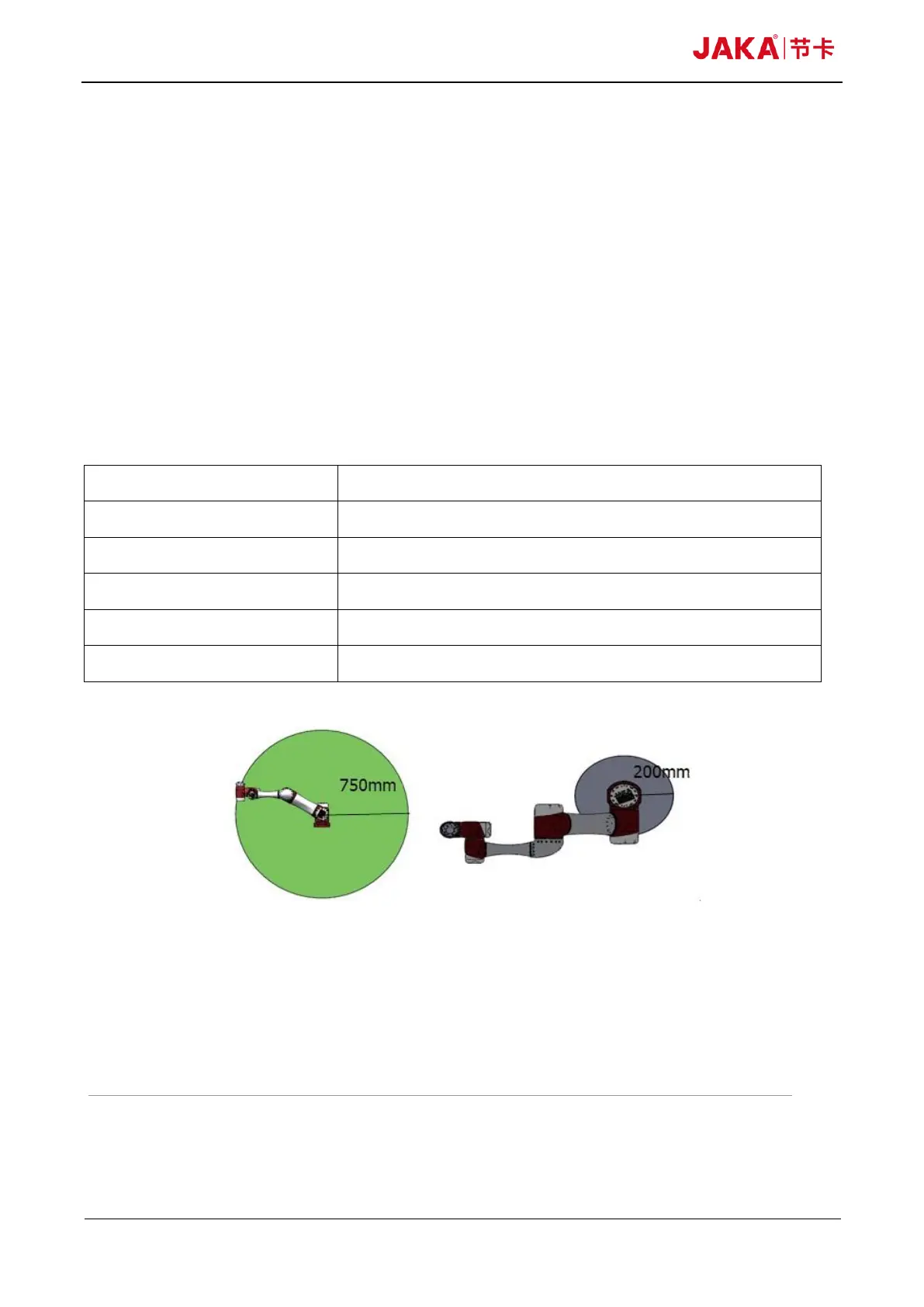
Fig5.1
Fig5-1: Certain areas of the workspace should receive attention regarding pinching hazards, due to the
physical properties of the robot arm. One area is defined for radial motions, when the wrist 1 joint is at a
distance of at least 750mm from the base of the robot. The other area is within 200mm of the base of the robot,
when moving in the tangential direction.
WARNING: There are two exceptions to the force limiting function that are
important to notice when designing the work cell for the robot. These are
illustrated in Figure 5.1. As the robot stretches out, the knee-joint effect can