JVL Industri Elektronik A/S - User Manual - Ethernet for MAC and MIS motors 299
12.4 Motor registers MISxxx
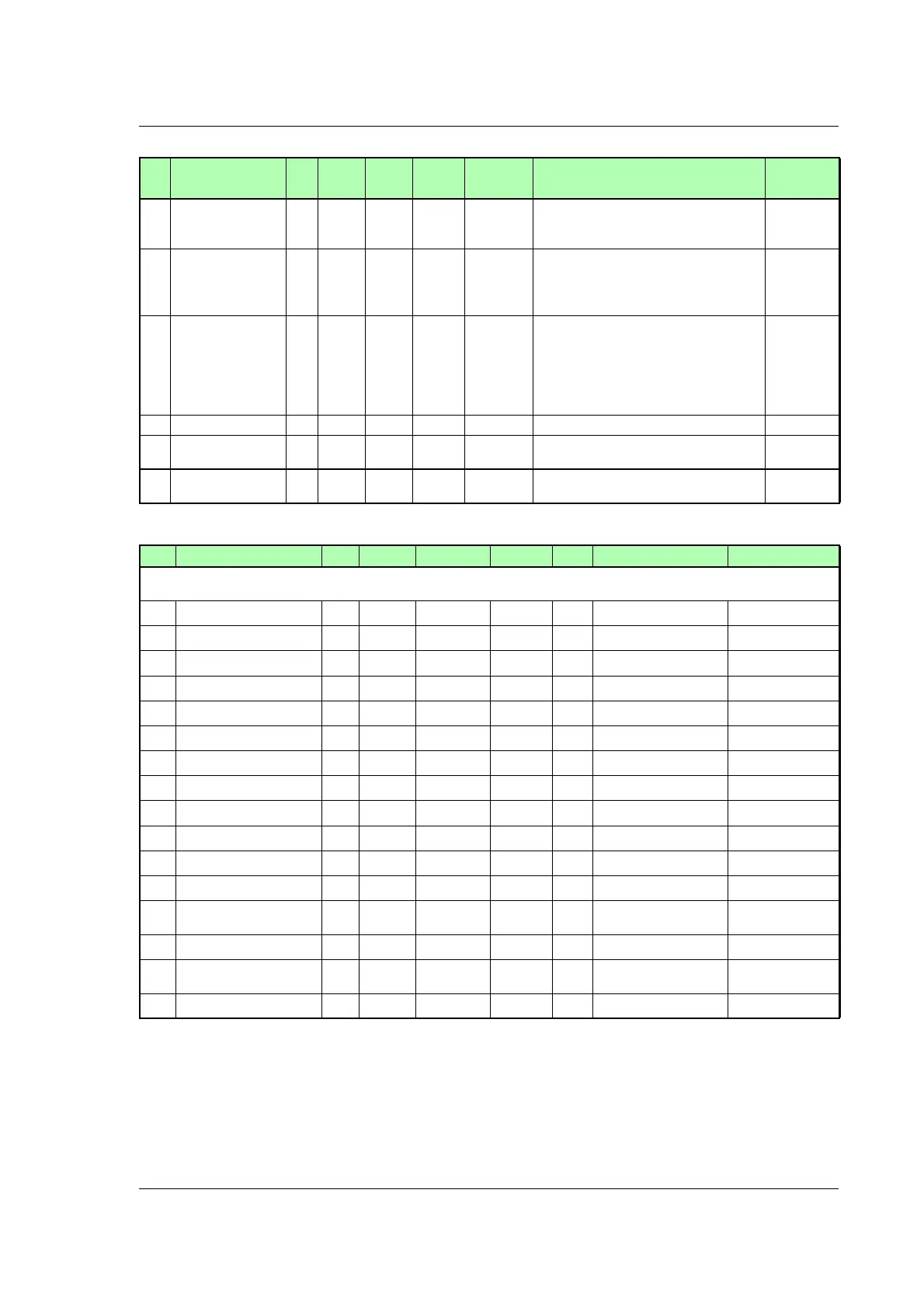
Reg Name Size Access Range Default Unit Description MacTalk
name
172 EXT_
ENCODER_
VEL
32bit R
(‐2
31
)‐
(2
31
‐1)
‐ Counts/16ms Thisregisterisupdatedwiththevelocityofthe
externalencoderinput.Thevelocityismeasured
every16ms.
External
encoder
Velocity
174 D_SOLL 32bit R/W 1‐
500,000
1000 RPM/s T he decelerationramptouse.Ifthisvalueis
changedduringatmovementitwillfirstbeactive
whenthemotorstopsorchangesdirection.If0,
A_SOLLisusedfordeceleration.
Deceleration
175 Internal_Encoder_Setup 32bit R/W ‐‐ Special Bit0‐1:Hysteresis(0,0.17,0.35,0.70deg)
Bit2‐4:Resolution(16,15,14,13,12*,11,10*, 9)
Bit5:Filtercutoff(16kHz,3kHz)
Bit6:Filtertime(0,1.2us)
*Closedloopcompatible
N/A
176 FW_BUILD 32bit R
0‐(2
32
‐1)
‐ Counts Currentfirmwarebuildnumber. “Statusbar”
177 InTargetPositionTime 32bit R/W
0‐(2
32
‐1)
10 ms Timethemotormuststandstillbefore
InTargetPositionflagisset.
N/A
179 BRAKE 32bit R/W
0‐(2
32
‐1)
‐ Special SelectswhichoneoftheeightI/Opinstousefor
theexternalbrake.
N/A
Reg Name Size Access Range Default Unit Description MacTalkname
Thefollowingparametersareonlyavailablewhen theCanOpenoptionisinstalledandonlyusedforDSP‐402
NOTE:DSP‐402isNOTsupportedyet!
180 ControlWord 32bit R/W 0‐65535 0 ‐ Object6040subindex0
181 StatusWord 32bit R 0‐65535 0 ‐ Object6041subindex0
182 ModeOf‐Operation 32bit R/W 0‐255 0 ‐ Object6060subindex0
183 ModeOfOperationDisplay 32bit R 0‐255 0 ‐ Object6061subindex0
184 Target‐Position 32bit R/W
(‐2
31
)‐(2
31
‐1)
0 ‐ Object607Asubindex0
185 Reserved
186 Actual‐Position 32bit R
(‐2
31
)‐(2
31
‐1)
0 ‐ Object6064subindex0
187 Reserved
188 Target‐Velocity 32bit R/W
(‐2
31
)‐(2
31
‐1)
0 ‐ Object60FFsubindex 0
189 Reserved
190 ActualVelocity 32bit R
(‐2
31
)‐(2
31
‐1)
0 ‐ Object606Csubindex0
191 Reserved
192 Digital‐Outputs 32bit R/W 0‐65535 0 ‐ Object60FEsubindex1
(Low16bit)
193 Reserved
194 DigitalInput 32bit R 0‐65535 0 ‐ Object60FDsubindex1
(Low16bit)
195