62 JVL Industri Elektronik A/S - User Manual - Ethernet for MAC and MIS motors
3.5 CiA® DSP-402 drive profile
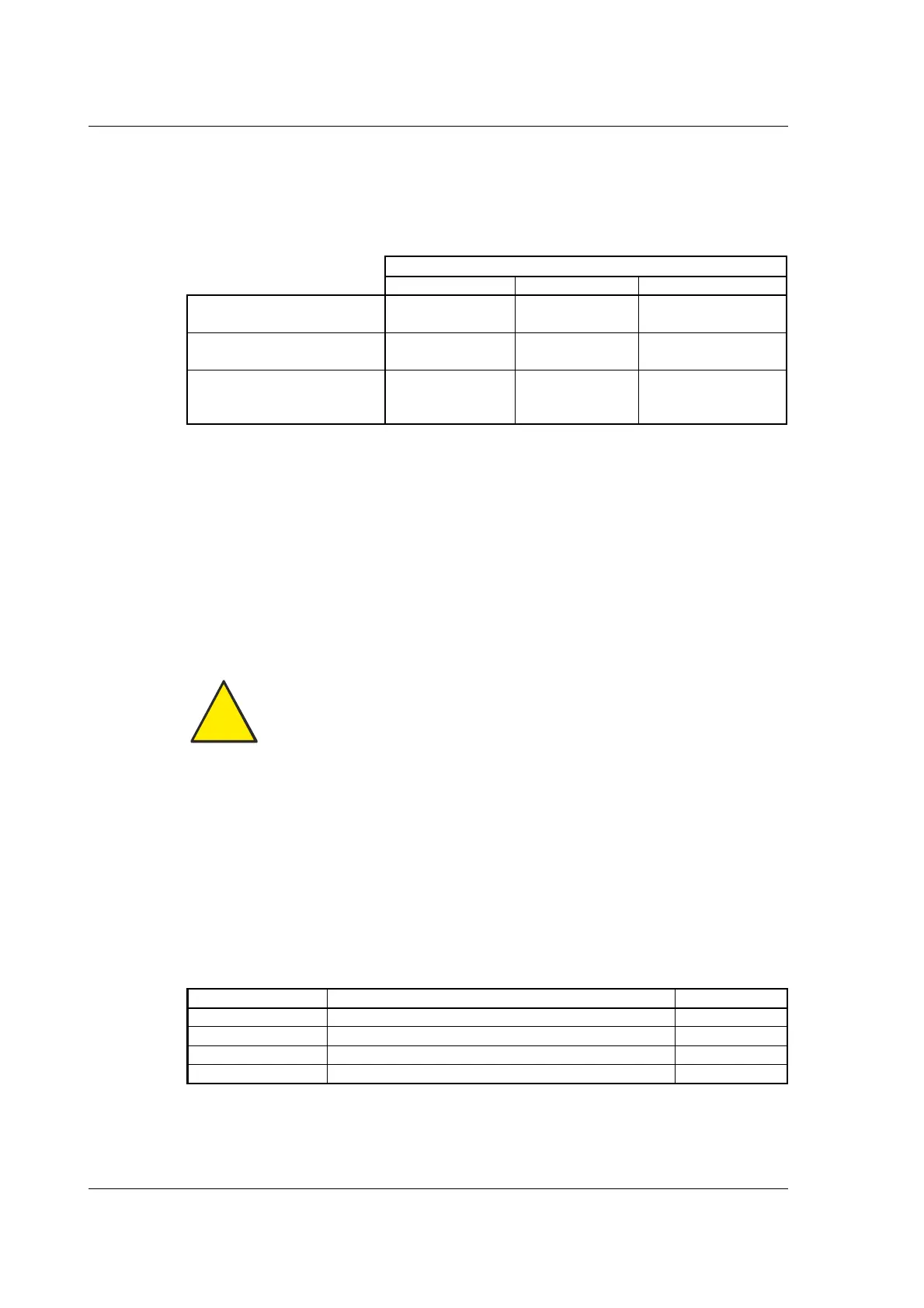
3.5.9 Supported cycle times
The cycle time is the amount of time between each cyclic request (PDO) on the Ether-
net. If the module is mounted in MAC050-MAC141 it is possible to add a poll division
factor either in the EtherCAT tab in Mactalk or manually in module register 8 (See chap
-
ter 8 - Register 8 - Poll division factor., page 230).
* If using MIS/MIL17/23 motor or using MIS/MIL34/43 motor with hardware version
1.6 or newer AND Ethernet hardware version 1.3 or newer ("Min. cycletime: 1ms"
is showed in EtherCAT tab, moduleinfo frame in Mactalk).
See also How to find FW/HW version at product, page 13.
** If the master has larger jitter than listed the lowest and highest shift time value in
the table must not be used.
*** 30% sync0 shift time will only work if cycle time is different from 2ms.
**** If 2ms cycle time is chosen, then it is also nesesary to chose 2ms motor cycle time
in Mactalk or select FreeRun.
Refer to Shift time., page 69 for changing the shift time.
If operating with values lower than listed then the motor will behave unpredictably.
WARNING: As seen in the table above the MAC050-141 don't support Dis-
tributed Clock and have a minimum cycle time of 16ms when using DSP-402.
For these reasons the Cyclic operation modes normally used by masters are
NOT recommended.
3.5.10 Factors
Position factor
The position factor is the relation between the user unit and the internal position unit
(counts). The position factor is automatically calculated when the feed constant (Object
0x6092) and gear ratio (Object 0x6091) are set.
Example:
We have a MAC motor with a 3.5:1 gear box connected to a belt drive. The diameter of
the drive wheel is 12.4 cm. We want the unit of position to be in millimetres.
The circumference of the drive wheel is 389.56mm (124mm*pi). The parameters should
be set as follows:
Please note that it is not necessary to set the encoder resolution. This is automatically set
by the module.
Motor series
MAC050-141 MAC400+ MIS/MILxxxxxxECxx
Supported cycle times with
Distributed Clock
DC not supported 1 or 2 ms **** 1ms*, 2, 3, 4 ms
CiA402 profile minimum
cycle time
16ms 1ms 1ms*
Applicable shift time for
a master with max. ±20µs
jitter on cyclic frames**
-
0, 10, 20, 30 ***,
40%
0, 10 (,20, 30, 40%)*
Object Name Value
0x6091subindex1Gearratio/Motorrevolutions 35
0x6091subindex2Gearratio/Shaftrevolutions 10
0x6092subindex1 Feedconstant/Feed 38956
0x6092subindex2 Feedconstant/Shaftrevolutions 100
!