3.7 Elimination des défauts
En fonction des spécifications de votre installation, différentes causes peuvent être à la source du défaut apparu.
En présence de systèmes multiaxes, d'autres causes d'erreur cachées peuvent apparaître.
Vous trouverez des informations relatives à la réparation des anomalies dans le paragraphe «
Elimination de dérangements» de l'Online Help. Notre Département Applications est à votre
disposition pour vous aider en cas de problèmes.
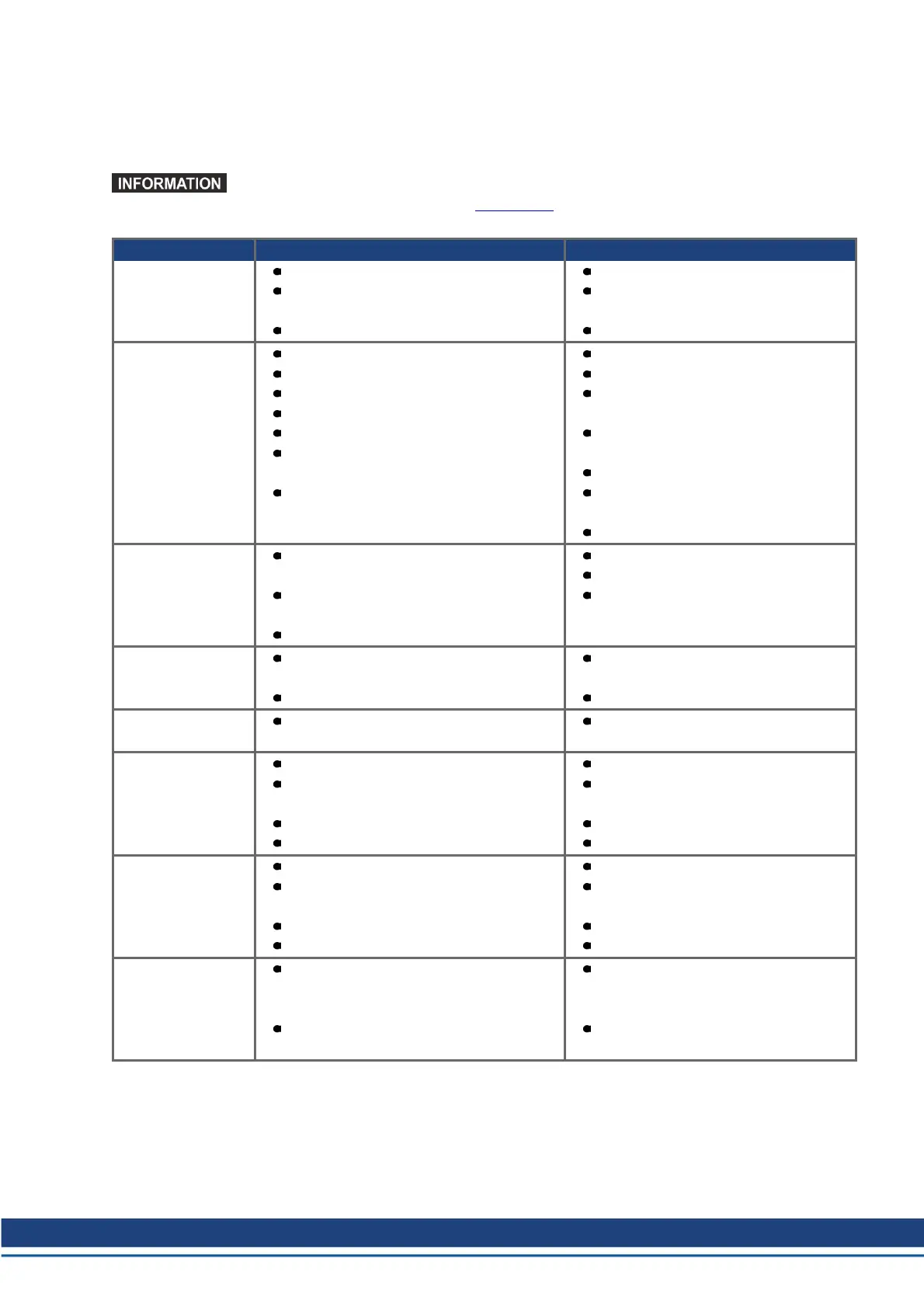
Défaut Causes probables du défaut Remède
MMessage de
défaut
Dérangement de
communication
utilisation d'un câble pas correcte
le câble n'est pas enfiché sur le bon
emplacement
mauvaise interface PC sélectionnée
utiliser un câble modem zéro
enficher le câble sur l'emplacement
correct
sélectionn*er l'interface correcte
Le moteur ne
tourne pas
le variateur n'est pas validé
coupure du câble de val. de consignes
les phases moteur permutées
le frein n'est pas desserré
le système est mécaniquement bloqué
le nombre de pôles du moteur n'est pas
correctement réglé
la rétroaction n'est pas correctement
réglée
appliquer le signal ENABLE
vérifier le câble de va. de consignes
posez les phases moteur cor-
rectement
vérifier la commande d'excitation du
frein
vérifier la mécanique
régler le paramètre “nombre de pôles
du moteur"
régler la rétroaction correctement
Le moteur vibre l'amplification est trop élevée (régulateur
de vitesse)
le blindage du câble de rétroaction est
coupé
AGND n'est pas câblée
diminuer Kp (régulateur de vitesse)
remplacer le câble de rétroaction
relier l'AGND à la CNC-GND
Le servosystème
signale un défaut
de poursuite
I
rms
ou I
peak
trop faible
rampe de valeur de consigne trop grande
augmenter I
rms
ou I
peak
(en observant
les données moteur!)
diminuer Rampe SW +/-
Le moteur devient
trop brûlant
I
rms
/I
peak
trop grande diminuer I
rms
/I
peak
Le servosystème
est trop lâche
Kp (régulateur de vitesse) trop faible
Tn (régulateur de vitesse) trop grande
ARLPF / ARHPF trop grande
ARLP2 trop grande
augmenter Kp (régulateur de vitesse)
Tn (régulateur de vitesse), valeur
implicite du moteur
diminuer ARLPF / ARHPF
diminuer ARLP2
Le servosystème
ne tourne pas en
souplesse
Kp (régulateur de vitesse) trop grande
Tn (régulateur de vitesse) trop faible
ARLPF / ARHPF trop faible
ARLP2 trop faible
diminuer Kp (régulateur de vitesse)
Tn (régulateur de vitesse), valeur
implicite du moteur
augmenter ARLPF / ARHPF
augmenter ARLP2
L'arbre dérive à
valeur de consi-
gne=0V
l'offset pour la valeur de consigne pré-
définie analogique n'est pas cor-
rectement équilibré
l'AGND n'est pas reliée à la CNC-GND
de l'API
équilibrer l'offset VC (Analog I/O)
relier l'AGND et la CNC-GND
S300 Safety Guide | 3 Français
Kollmorgen | wiki-kollmorgen.eu | December 2015 85
 Loading...
Loading...







