Group 5 Transport/Start up Page 45
JET2 neo Release R1.07 en
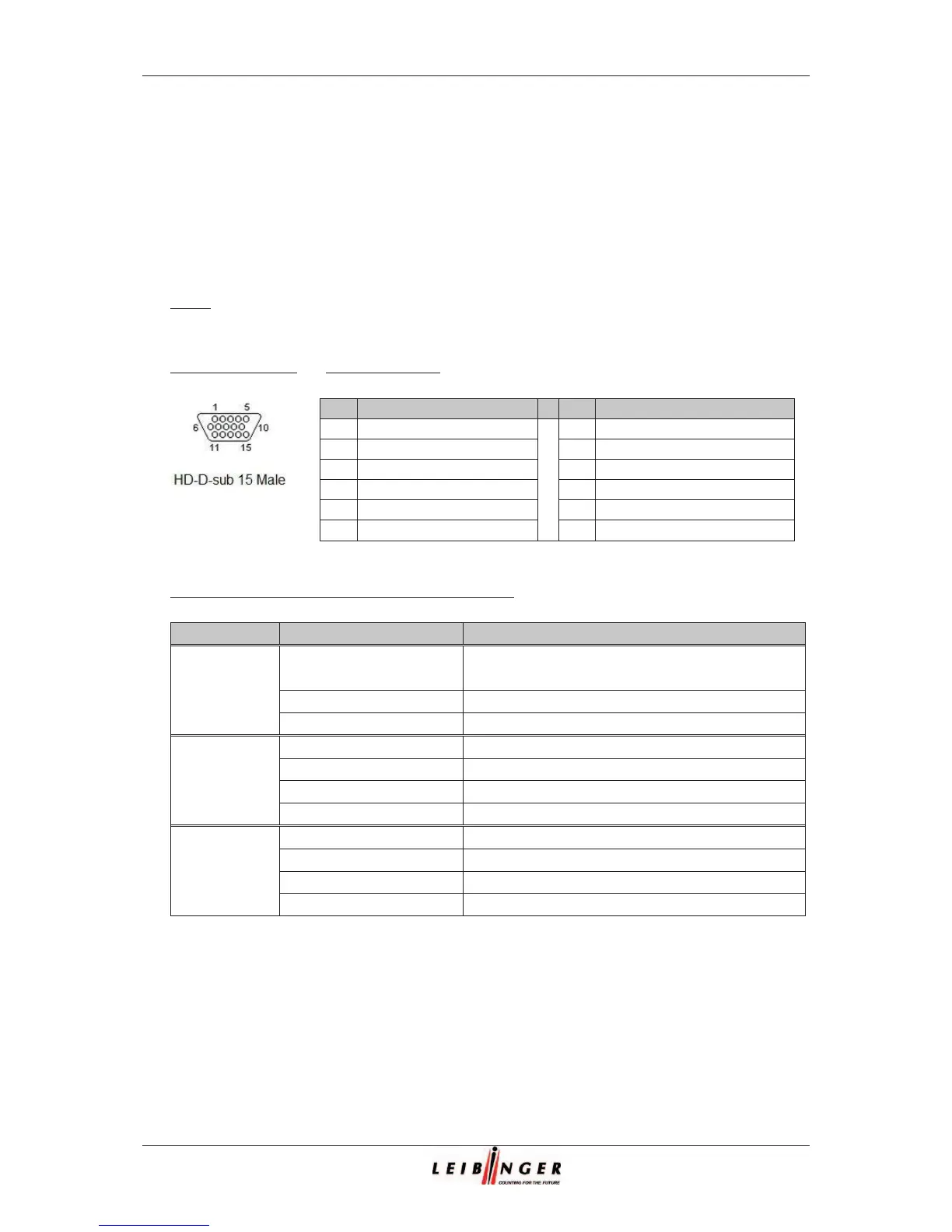
5.5.1 Interface X1 (Encoder)
5.5.1.1 Description and configuration
The interface “X1” provides the connection of a shaft encoder.
Due to the input for which you can set the software individually, the encoders can
be connected according to different norms without an additional converter.
For variable product speed you have to use a shaft encoder to synchronize
the printing speed or to control the constant font width.
Basic data/Recommended working conditions:
Difference input t +/-200mV
Input voltage range: -0.3 up to 5.5V
(1)
All 24V inputs which are designated with (1) are protected by a self-reset fuse with 700 mA.