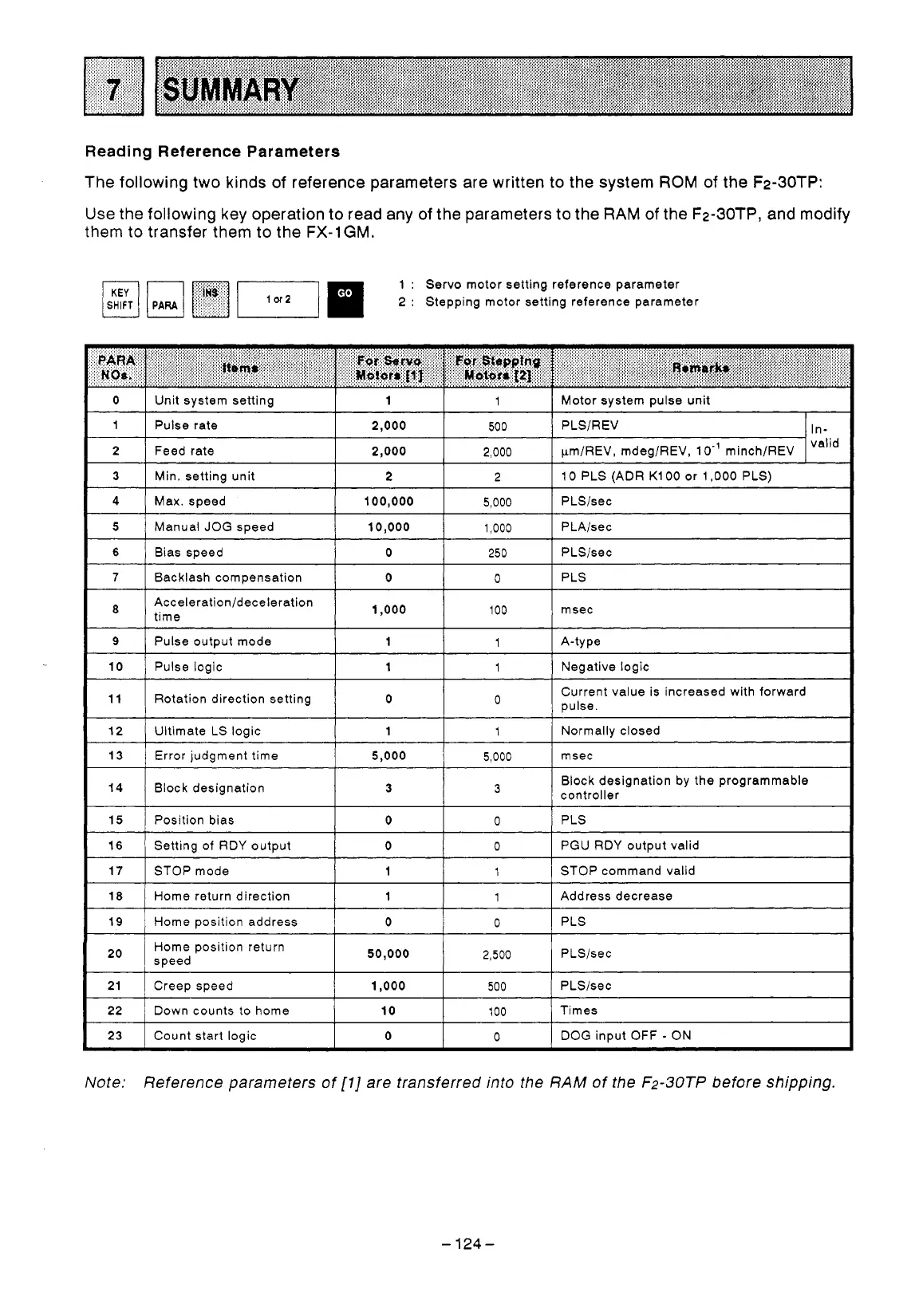
Reading Reference Parameters
The following two kinds of reference parameters are written to the system ROM of the F2-30TP:
Use the following key operation to read any of the parameters to the
RAM
of the Fz-SOTP, and modify
them to transfer them to the FX-1GM.
1
:
Servo motor setting reference parameter
2
:
Stepping motor setting reference parameter
o
I
Unit system setting
I
1
I
1
I
Motor system pulse unit
1
Feed rate
2
In-
PLS/REV 500
2,000
Pulse rate
PLS/sec
5,000
100,000
Max. speed
4
10
PLS (ADR
K1OO
or
1,000
PLS)
2
2
Min. setting unit
3
pm/REV, mdeg/REV,
10”
minch/REV
2,000
2,000
valid
5
1
Manual
JOG
speed
1
10,000
1
1,000
I
PLA/sec
6
PLS
0
0
Backlash compensation
7
PLSisec
250
0
Bias speed
Acceleration/deceleration
1
1,000
9
Negative logic
1
1
Pulse logic
10
A-type
1
1
Pulse output mode
11
I
Rotation direction setting
I
0
0
Current value is increased with forward
pulse.
12
msec
5,000
5,000
Error judgment time
13
Normally closed
1
1
Ultimate LS logic
14
1
Block designation
3
31
Block designation by
the
programmable
controller
I
I
1
I
15
PLS
0
0
Position bias
16
1
Setting of RDY output
I
0
I
0
I
PGU
RDY output valid
17
Address decrease
1
1
Home return direction
18
STOP command valid
1
1
STOP mode
19
I
Home position address
I
0
I
0
I
PLS
2o
i
speed
Home position return
I
50,000
21
1
Creep speed
1
1,000
I
500
1
PLS/sec
22
I
Down counts
to
home
1
10
I
loo
I
Times
23
1
Count start logic
I
0
I
0
I
DOG
input
OFF
-
ON
Note: Reference parameters of
[I]
are transferred into the
RAM
of
the
F2-3OTP
before shipping.
-
124
-
 Loading...
Loading...







