2.3.3 Compensation for mechanical failings
The
following parameters apply to
all
instructions in
the
program:
Home position address
ZERO ADDRESS
Backlash compensation
BACKLASH
Travel distance compensation
POSITION BIAS
All absolute DRV instructions in the program will use this point as the reference position.
Normally, this
is
zero, but sometimes it may be more convenient
to
set
this
to
some other
value: range:
0
to
2
999,999.
Unit based on PARA number 3 (Unit Scale).
0
(factory setting)
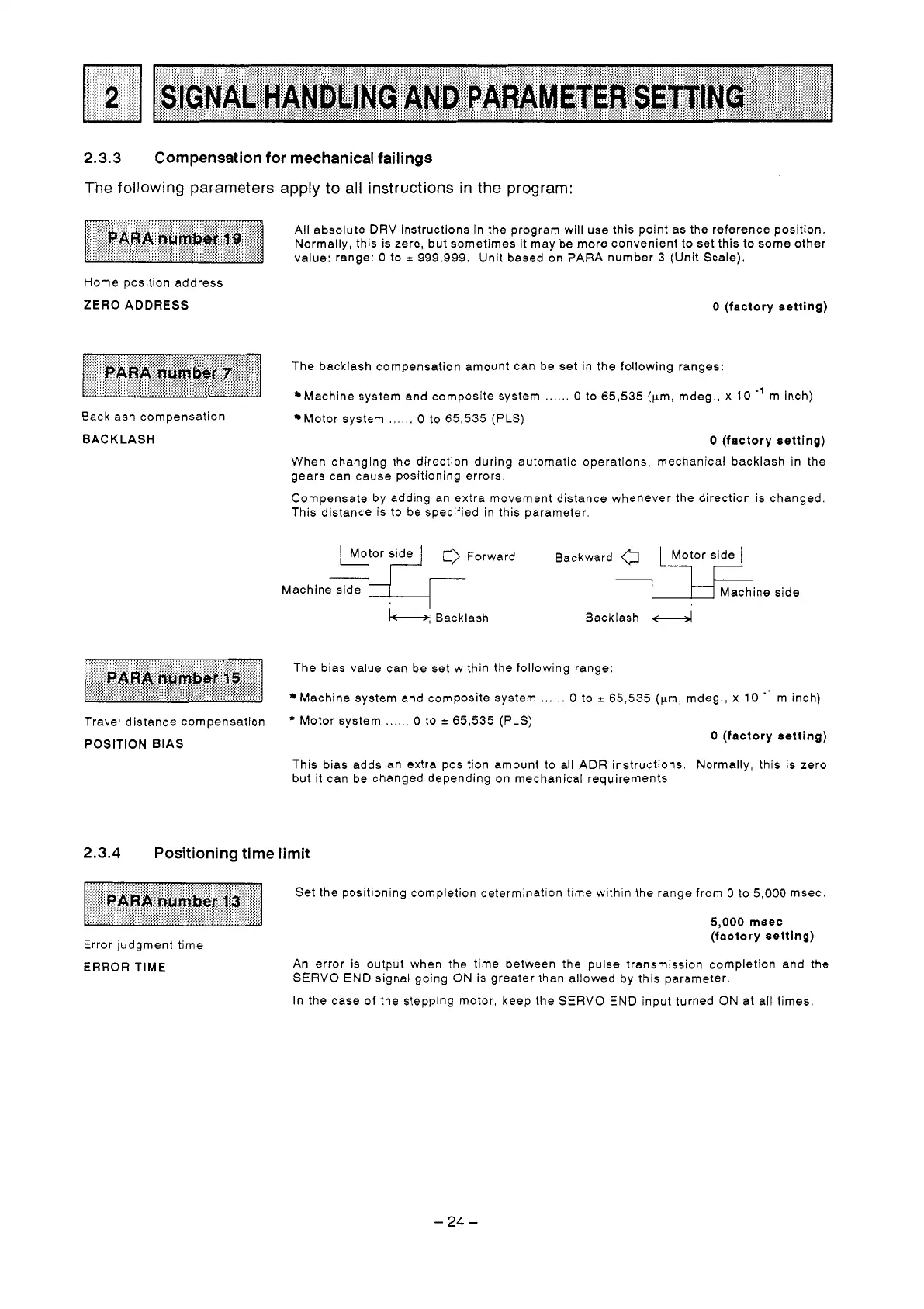
The backlash compensation amount can be
set
in the following ranges:
Machine system and composite system
......
0
to
65,535 (pm, mdeg., x
10
-’
m inch)
Motor system
.,....
0
to
65,535
(PLS)
0
(factory setting)
When changing the direction during automatic operations, mechanical backlash in the
gears can cause positioning errors.
Compensate by adding an extra movement distance whenever the direction is changed.
This distance is
to
be specified in this parameter.
Machine side
w
&
Backlash
The bias value can be set within
Machine system and composite
iH
Machine side
Backlash
id
the following range:
system
......
0
to
*
65,535 (pm, mdeg., x
10
.’
m inch)
*
Motor system
......
0
to
r
65,535
(PLS)
0
(factory setting)
This bias adds an extra position amount
to
all ADR instructions. Normally, this is zero
but it can be changed depending on mechanical requirements
2.3.4
Positioning time limit
Set the positioning completion determination time within the range from
0
to
5,000 msec.
5.000
rnsec
Error judgment time
(factory setting)
ERROR
TIME
An error is output when the time between the pulse transmission completion and the
SERVO END signal going ON is greater than allowed by this parameter.
In the case of the stepping motor, keep the SERVO END input turned ON at all times
-
24
-
 Loading...
Loading...







