When this instruction is executed, home return is executed
to
the machine home position in
accordance with the procedure described on page
25.
This position is normally the position with an absolute address of
0
(set by parameter number 19).
This drives
to
the general return position as indicated by the return address
RAD
register. This differs
from DRV
ZRN
in that positioning is based on a register and not on the external hardware position
of the DOG switch. Thus, the accuracy of the DRV
ZRN
is greater.
DRV
RAD is a convenient
secondary temporary home position in the work area.
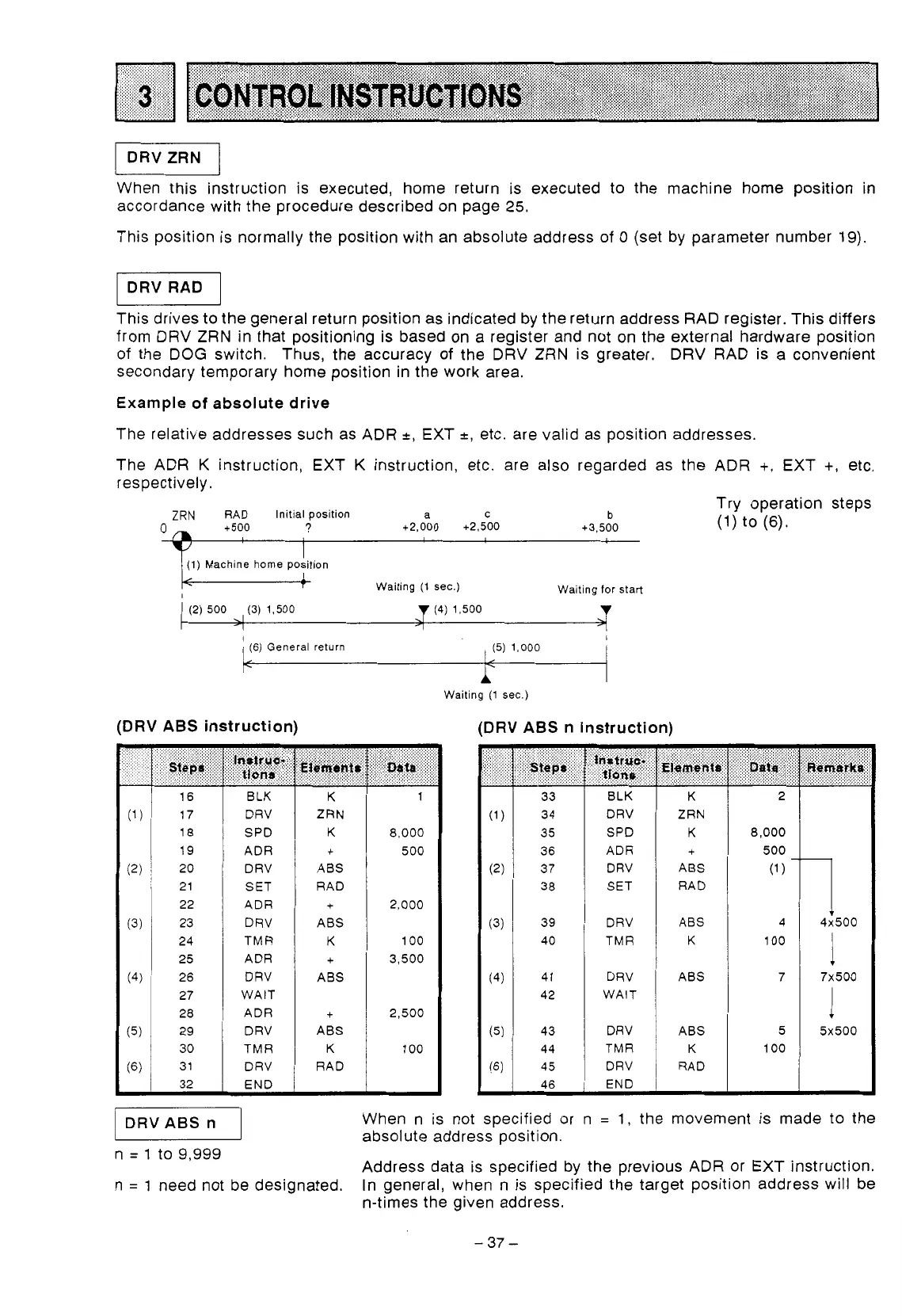
Example
of
absolute drive
The relative addresses such as ADR
2,
EXT
+,
etc. are valid as position addresses.
The ADR
K
instruction, EXT
K
instruction, etc. are also regarded as the ADR
+,
EXT
+,
etc.
respectivelv.
ZRN
RAD
Initial position
a
C
0
-
+500
?
+2,000
~2.500
b
+3.500
(1)
Machine home position
Waiting (1 sec.) Waiting for start
I
(2)
500
(3)
1,500
(6)
General return
(5)
1,000
/
p'
Waiting
(1
sec.)
(DRV ABS instruction)
.........
...............
..........................
.......
;::;
i::,:,:,:.dS#~~ii
l~
:::,:::ti,6fi#:;,:;;:
...
BLK
D RV
SPD
ADR
DRV
SET
ADR
DRV
TMR
ADR
DRV
WAIT
ADR
DRV
TMR
DRV
END
.:.:
.......
:,.
:...:.
-
I
DRVABS
n
I
n = 1 to 9,999
..................
..............::
............
:
...................
.:.:.:.:
..........................
::
............
...........
:.:::;::.:
,::.:...:.:.
K
ZRN
K
...............
:$#**~;f$
.
...,.:
..................
:
.......................
+
ABS
RAD
+
ABS
K
+
ABS
+
ABS
K
RAD
(DRV
ABS n instruction)
8,000
500
I
100
7 7x500
I
5
5x500
100
When n is not specified or n
=
1,
the movement is made to the
absolute address position.
Address data is specified by the previous ADR or EXT instruction.
n
=
1
need not be designated. In general, when n is specified the target position address will be
n-times the given address.
-37-
 Loading...
Loading...







