Be careful not to enter the robot’s working area to avoid any collision.
Watch the robot’s movements while using Niryo Studio.
Activate the emergency stop button in emergency or abnormal situations.
Operating conditionsOperating conditions
Parameters Value
Minimum Ambient Temperature +5°C
Maximum Ambient Temperature
+45°C
Mechanical interfaceMechanical interface
Mechanical OverviewMechanical Overview
This chapter introduces the mechanical and the electrical interfaces of Ned2.
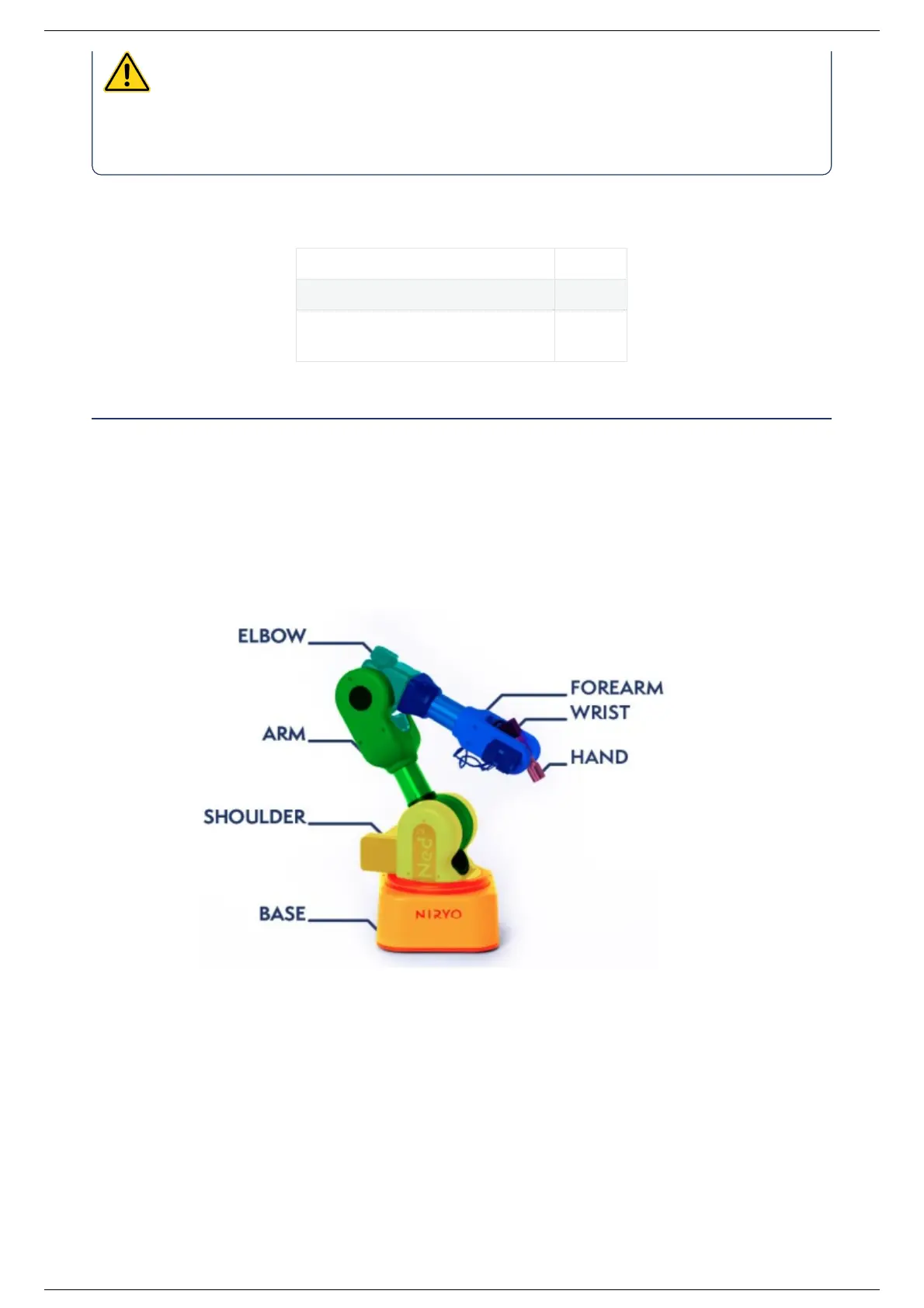
Ned2 is a 6-axis collaborative robotic arm. It consists mainly of six robot joints of aluminum with plastic
covers. Ned2 consists of 7 parts :
3D view of the robot3D view of the robot