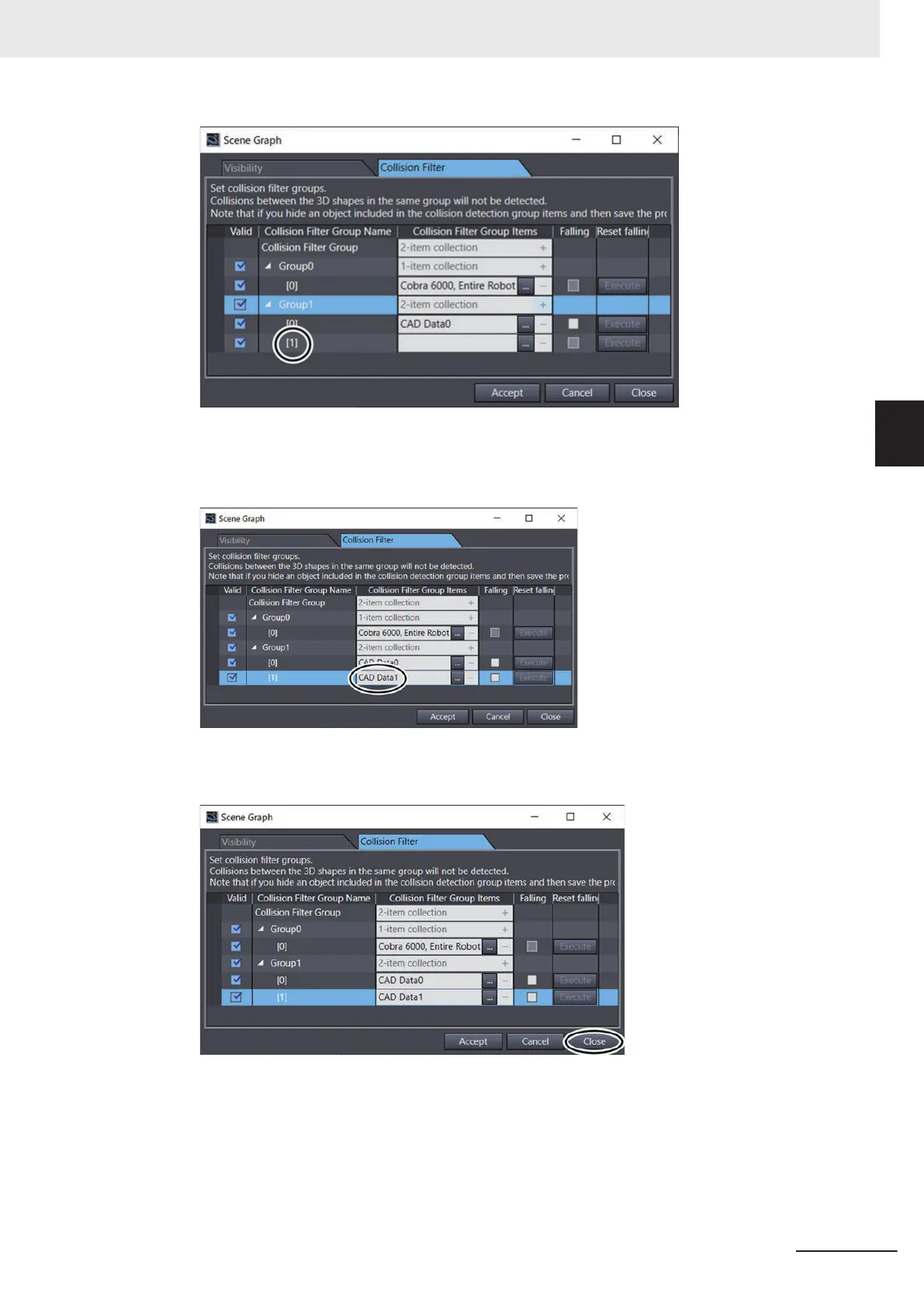
12 Follow the step 8 to 10 to register CAD Data1 for Group1 - [1].
CAD Data1 is registered to the Collision Filter Group Items column for Group1 - [1].
13 Click the Close button in the Scene Graph dialog box.
Now, the settings for checking the conflict between the robot, Conveyor A, and Conveyor B have been
completed.
3 Implementation Example of Static Pick-and-place Equipment
3-55
NJ-series Robot Integrated System Startup Guide (O049)
3-3 Programming and Simulation Procedures
3
3-3-5 Placing 3D Shape Data

 Loading...
Loading...












