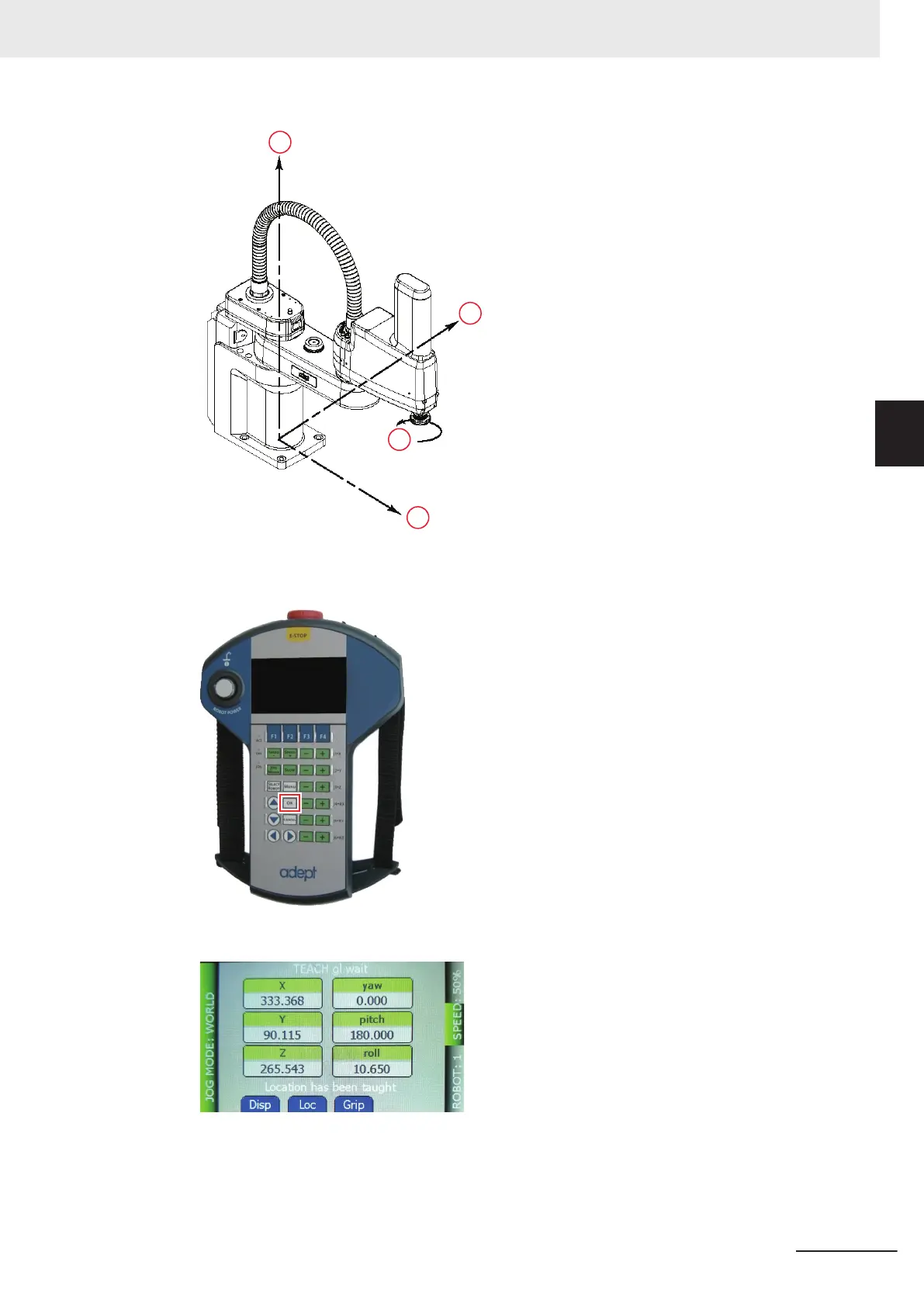
18 Press the OK button.
The value of position is updated to the current robot position.
19 Press the F2 (Loc) button and then F4 button (Next>).
The AVAILABLE LOCATIONS screen is displayed again.
3 Implementation Example of Static Pick-and-place Equipment
3-89
NJ-series Robot Integrated System Startup Guide (O049)
3-4 Setup Procedure for Actual System
3
3-4-3 Teaching

 Loading...
Loading...












