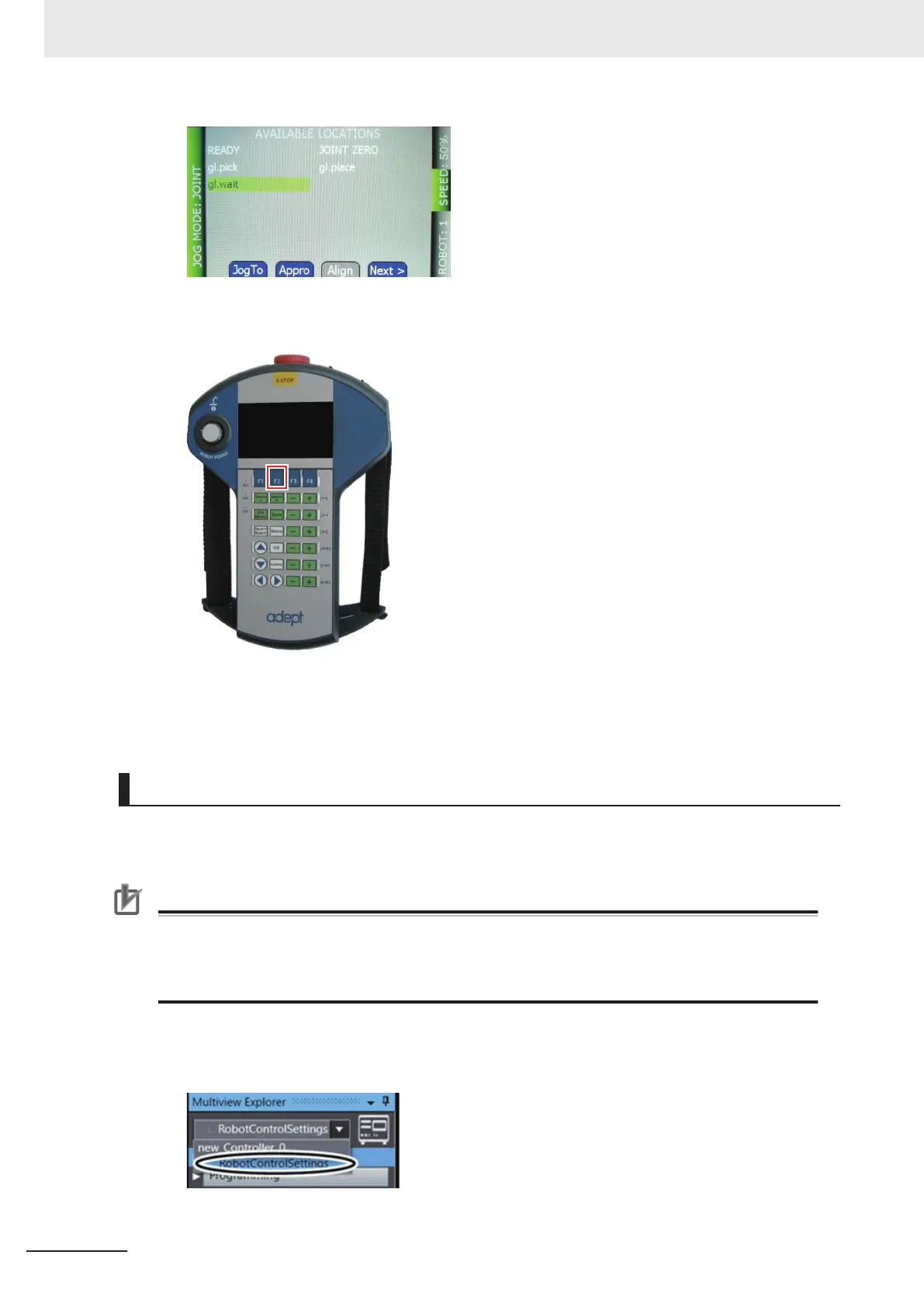
20 If the variable selected in step 10 is gl.pick or
gl.place, press and hold the F2 button (Appro).
The robot moves linearly to the top of the selected position.
21 If there are still positions left to adjust, return to step 10.
Saving Teaching Position in SD Memory Card
The teaching position data is saved in the SD Memory Card so that the data is retained after the pow-
er supply to the Robot Integrated CPU Unit is turned OFF
.
Precautions for Correct Use
If the power supply to the Robot Integrated CPU Unit turned OFF without saving position data in
the SD Memory Card, the adjusted position data is lost, and then the robot may perform unin-
tended operations the next time that the CPU Unit is started. Perform this procedure if you per-
form teaching on the actual system.
1 Click RobotControlSettings from the device list in the Multiview Explorer of the Sysmac Stu-
dio.
3 Implementation Example of Static Pick-and-place Equipment
3-90
NJ-series Robot Integrated System Startup Guide (O049)

 Loading...
Loading...












