Main Program
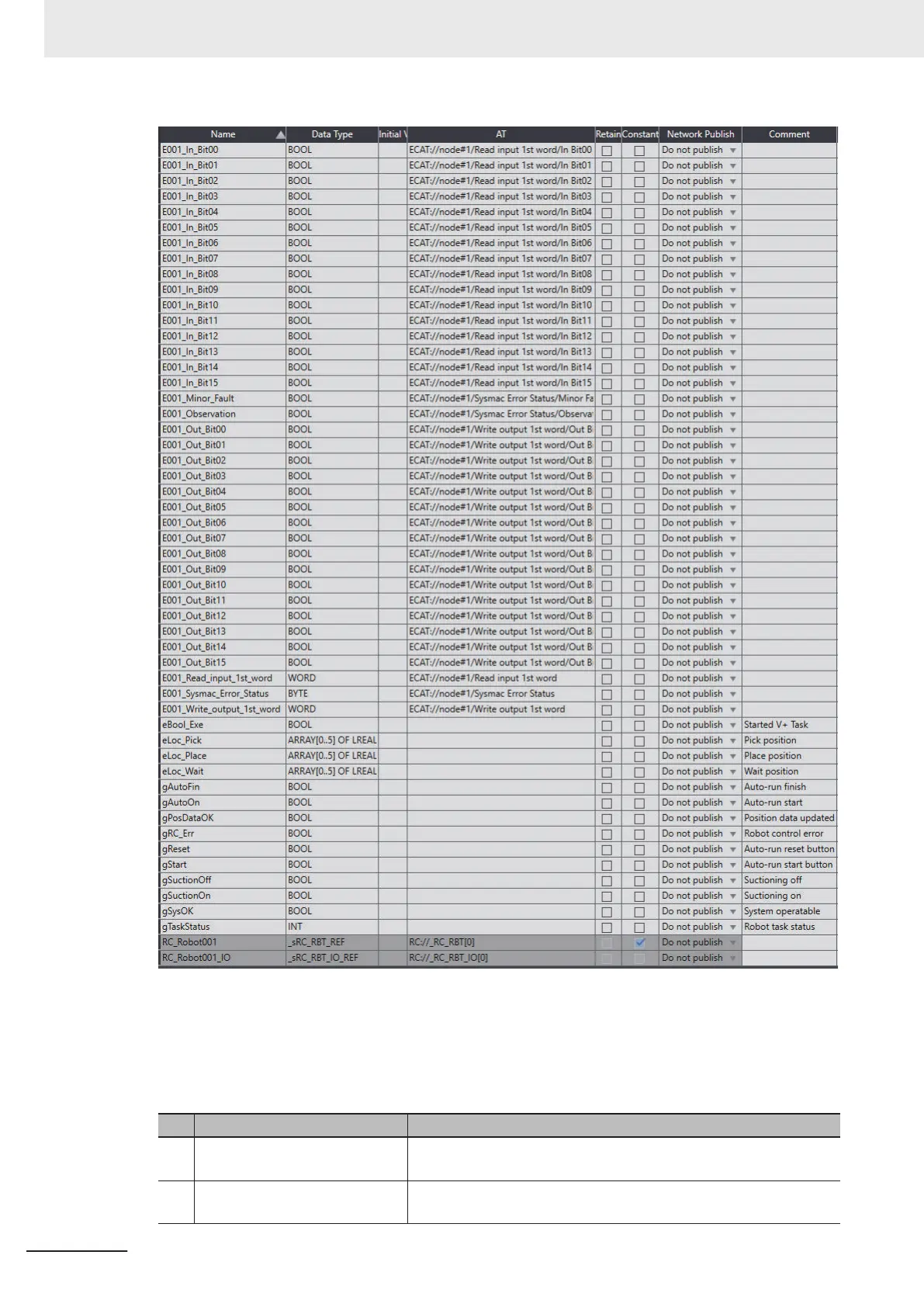
"Main" (main program) is used to monitor the status of the following robots and EtherCAT Digital
I/O Terminals and determine whether the automatic operation can start.
Refer to the manual for each device for details on variables.
No. Variable name Description
1 _EC_PDSlavTbl[1] Check that the communications of the EtherCAT Digital I/O Termi-
nal are established.
2 _RC_RBT[0].DrvStatus.Run-
Mode
Check that the communications between the Robot Integrated CPU
Unit and the robot are established.
3 Implementation Example of Static Pick-and-place Equipment
3-4
NJ-series Robot Integrated System Startup Guide (O049)

 Loading...
Loading...












