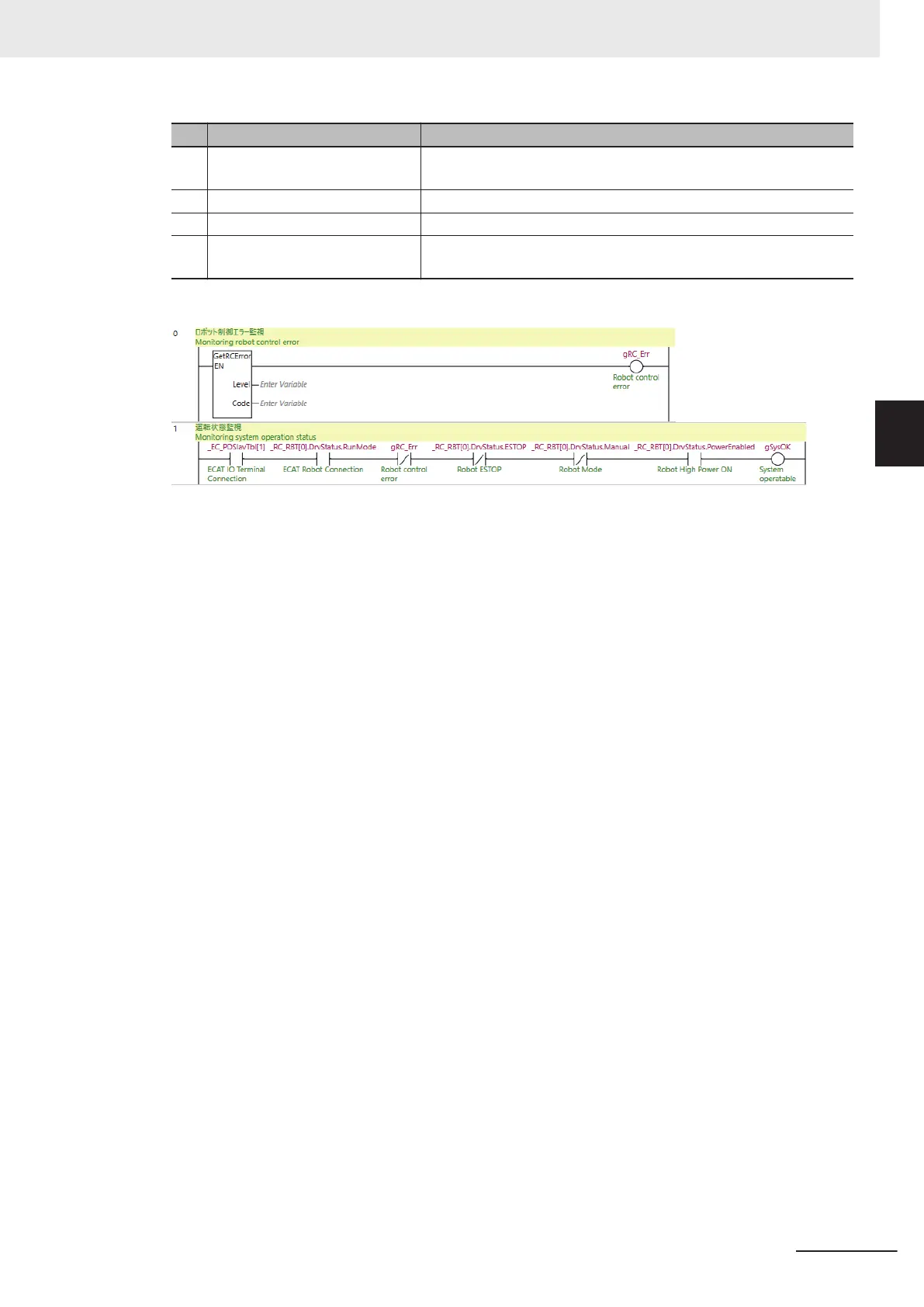
No. Variable name Description
3 GetRCError Check whether an error caused by the Robot Control Function
Module exists.
4 _RC_RBT[0].DrvStatus.ESTOP Check whether the robot is in ESTOP state.
5 _RC_RBT[0].DrvStatus.Manual Check that the operating mode of the robot is Manual mode.
6 _RC_RBT[0].DrvStatus.Power-
Enabled
Check that the robot high power is enabled.
A program is described below.
Operating Program
"Run" (operating program) is used to operate a robot.
A program is described below.
3 Implementation Example of Static Pick-and-place Equipment
3-5
NJ-series Robot Integrated System Startup Guide (O049)
3-1 Program Specifications for Static Pick-and-place
Equipment
3
3-1-1 When Operations are Controlled with Sequence Control Program

 Loading...
Loading...












