Shared Variables
The following table shows a list of shared variables that are used in the sequence control program.
No. Variable name Data type Description
1 eBool_ExeT1 BOOL Use the variable to check that the execution of V+ task 1 is started in the
sequence control program.
2 eBool_ExeT2 BOOL Use the variable to check that the execution of V+ task 2 is started in the
sequence control program.
3 eBool_Mode BOOL Use the variable to check the operating mode in the Robot Integrated CPU
Unit in the V+ program.
4 eBool_Reset BOOL Use the variable to check that the reset button is pressed during automatic
operation in the V+ program.
Sequence Control Program
This section describes the sequence control program required for controlling the operation of the static
pick-and-place equipment with the V+ program.
The sequence control program is used to register global variables and create "Main", a main program
that monitors the status of peripheral devices and determines whether the automatic operation can
start.
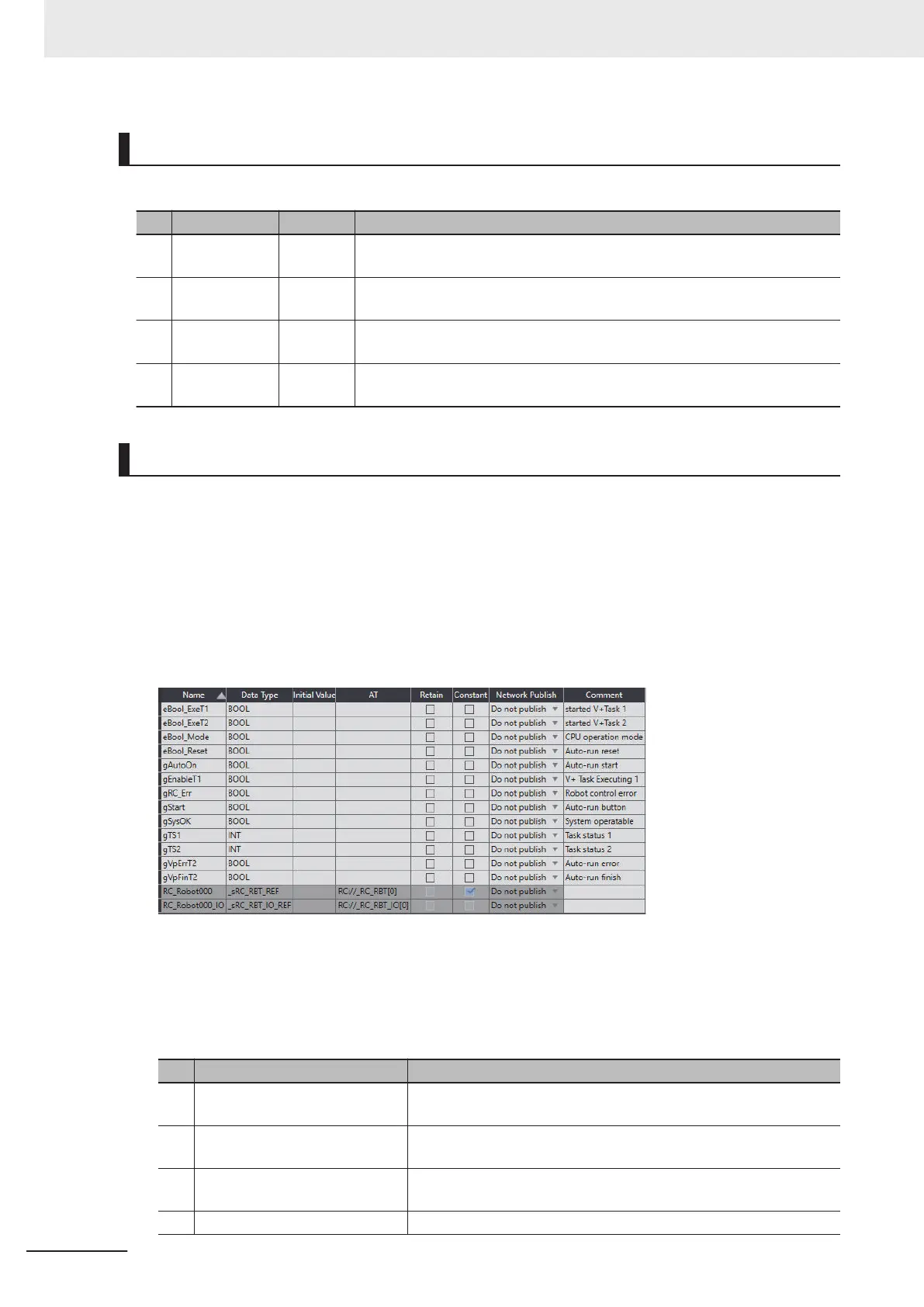
Global V
ariables
Register the global variables that are used in the sequence control program.
Main Program
"Main" (main program) is used to monitor the following status of the robot and EtherCAT Digital I/O
T
erminal and determine whether the automatic operation can start.
Refer to the manuals of each device for details on the variables.
No. Variable name Description
1 _EC_PDSlavTbl[1] Check that the communications of the EtherCAT Digital I/O Termi-
nal are established.
2 _RC_RBT[0].DrvStatus.Run-
Mode
Check that the communications between the Robot Integrated CPU
Unit and the robot are established.
3 GetRCError Check whether an error caused by the Robot Control Function
Module exists.
4 _RC_RBT[0].DrvStatus.ESTOP Check whether the robot is in ESTOP state.
3 Implementation Example of Static Pick-and-place Equipment
3-12
NJ-series Robot Integrated System Startup Guide (O049)

 Loading...
Loading...












