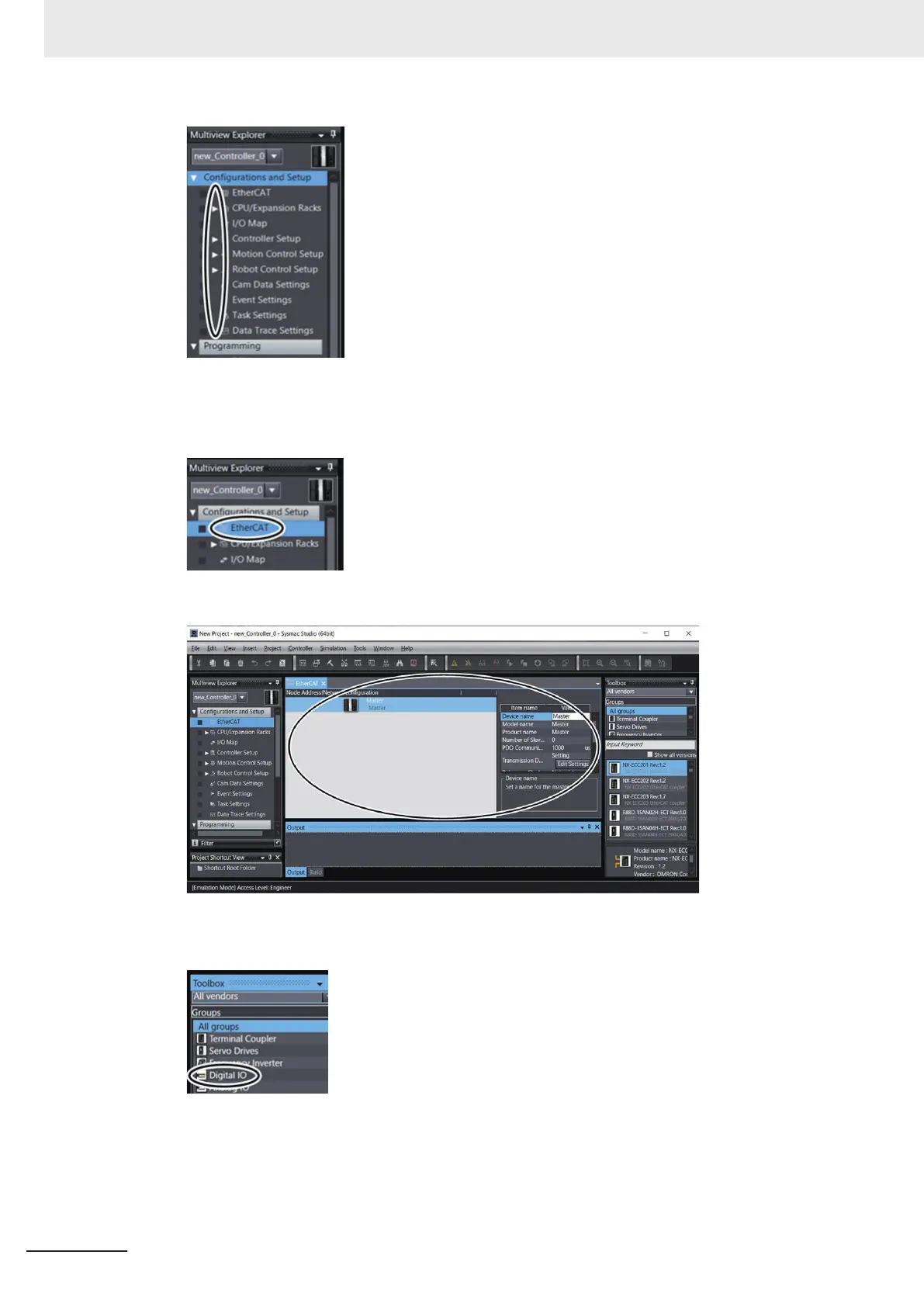
2 Double-click EtherCAT under Configurations and Setup in the Multiview Explorer. Or right-
click EtherCAT under Configurations and Setup and select Edit from the menu.
The EtherCAT Master is displayed in the EtherCAT tab page.
3 From the Toolbox, select the group of
Digital I/O.
4 Click and drag the digital I/O to use and drop it on the EtherCAT Master in the EtherCAT tab
page. In this example, select GX-MD3218.
3 Implementation Example of Static Pick-and-place Equipment
3-20
NJ-series Robot Integrated System Startup Guide (O049)

 Loading...
Loading...












