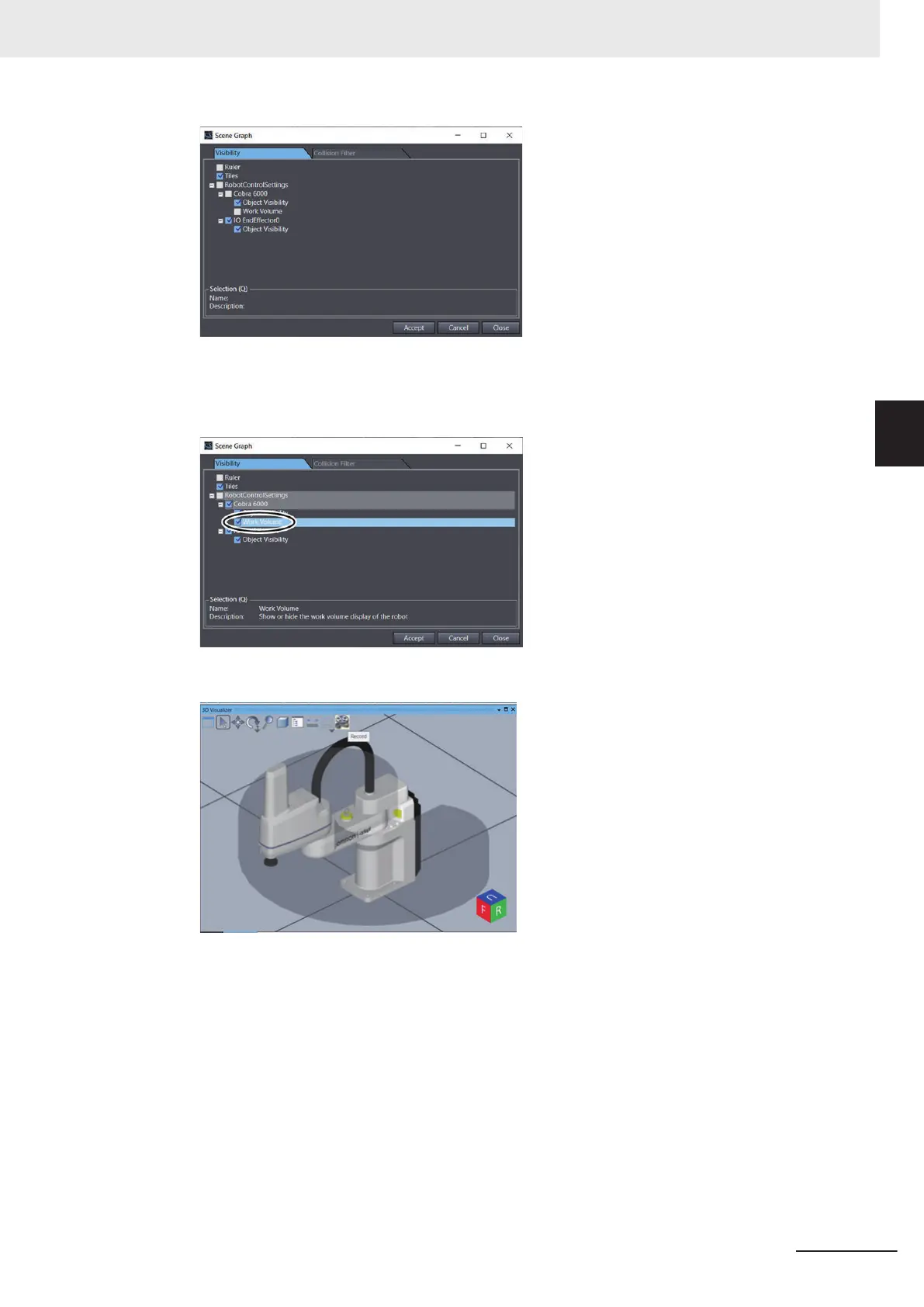
3 In the Visibility tab page, select the
Work Volume check box located under
RobotControlSettings - Cobra 6000.
The 3D Visualizer illustrates the robot’s operating range in gray.
4 Click the Close button on the Scene Graph dialog box.
3 Implementation Example of Static Pick-and-place Equipment
3-35
NJ-series Robot Integrated System Startup Guide (O049)
3-3 Programming and Simulation Procedures
3
3-3-5 Placing 3D Shape Data

 Loading...
Loading...












