12-22
12-4 Troubleshooting
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
12
Troubleshooting and Maintenance
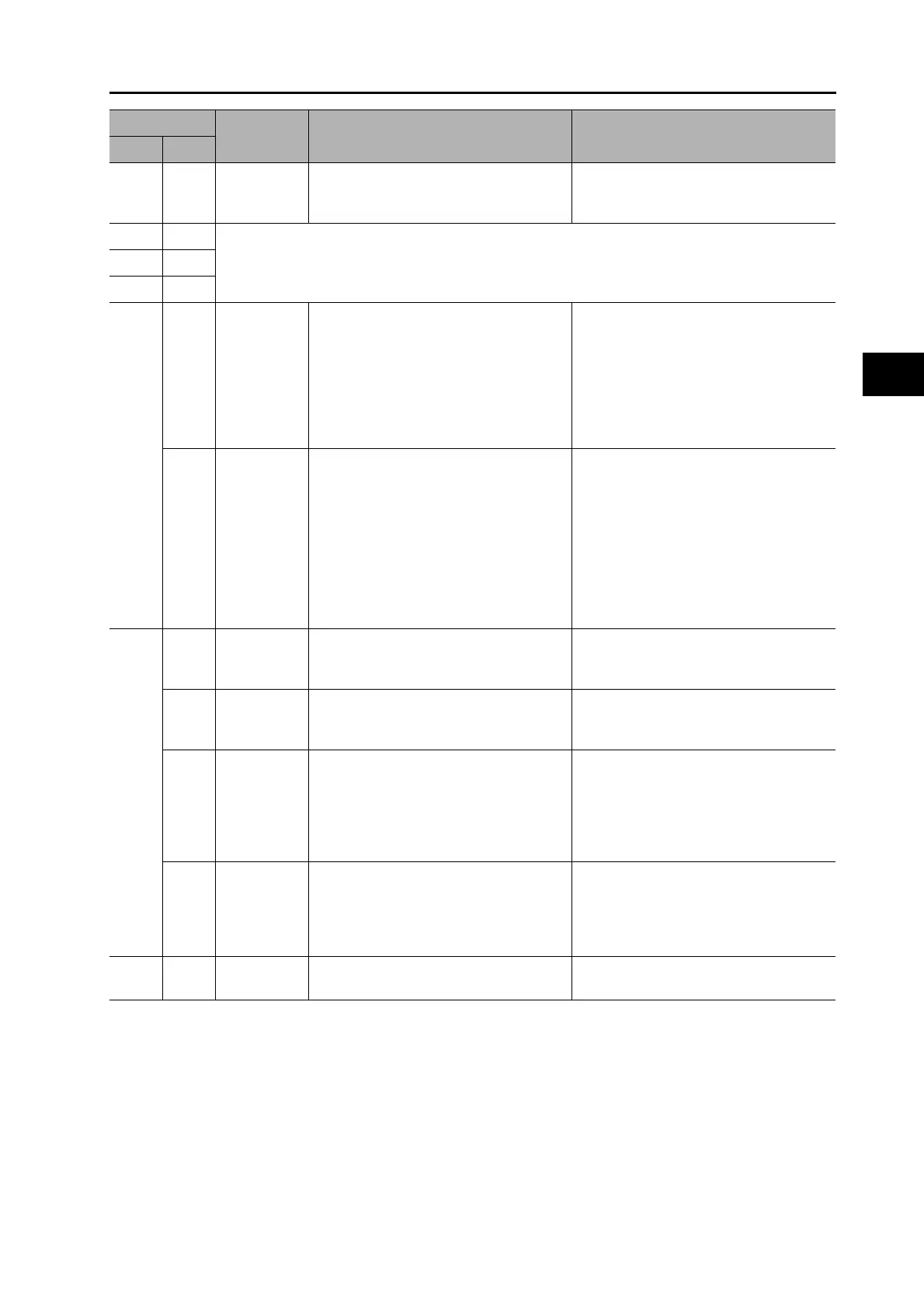
87 0
Immediate
Stop Input
Error
An Immediate Stop (STOP) signal was
entered.
Check the Immediate Stop (STOP) signal
wiring.
88 - Refer to Troubleshooting Errors Related to EtherCAT Communications on page 12-24.
90 -
91 -
92
0
Encoder Data
Restoration
Error
Initialization of internal position data was
not processed correctly in semi-closed
control mode and absolute value mode.
• Provide the required encoder power
supply voltage 5 VDC ±5% (4.75 to 5.25
V). Be careful especially when the
encode cable is long.
• If the Servomotor cable and the encoder
cable are bundled together, separate
them.
• Connect the shield to FG.
1
External
Encoder Data
Restoration
Error
Initialization of internal position data was
not processed correctly in fully-closed
control mode and absolute value mode.
• Provide the required external encoder
power supply voltage 5 VDC ±5% (4.75
to 5.25 V). Be careful especially when
the external encoder connection cable is
long.
• If the Servomotor cable and the external
encoder connection cable are bundled
together, separate them.
• Connect the shield to FG. Refer to the
external encoder connection diagram.
93
0
Object Setting
Error 1
Electronic gear ratio exceeded the
allowable range.
Check the object settings. The electronic
gear ratio must be set between 1/1000
and 1000.
2
Object Setting
Error 2
External encoder ratio exceeded the
allowable range.
Check the object settings. The external
encoder ratio must be set between 1/40
and 160.
3
External
Encoder
Connection
Error
The set value of the External Feedback
Pulse Type Selection (3323 hex) differs
from the external encoder type that is
actually connected for serial
communications. Electronic gear ratio
exceeded the allowable range.
Set object 3323 hex to conform with the
external encoder type that is actually
connected.
4
Function
Setting Error
The function that was set does not support
the communications cycle.
• The electronic gear object ratio was not
1:1 when the communications cycle was
set to 250/500 µs.
Check the communications cycle settings
or the electronic gear object.
95 0 to 4
Motor
mismatch
The Servomotor does not match the
Servo Drive.
Replace the Servomotor with a
Servomotor that matches the Servo Drive.
Error No. (hex)
Name Cause Measures
Main Sub
 Loading...
Loading...






