7 Applied Functions
7 - 32
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
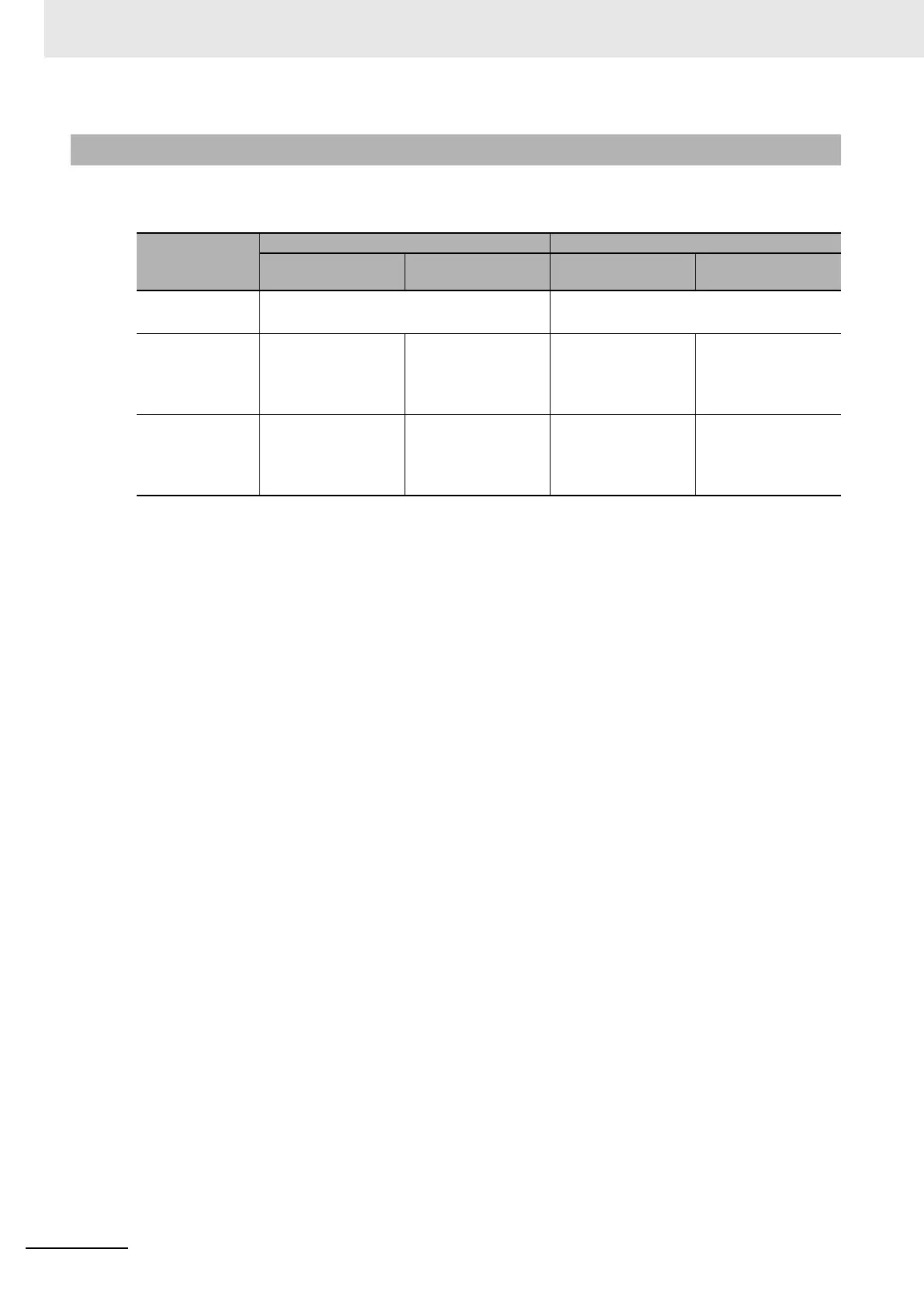
The following table shows the operations that are performed according to the setting of the Torque
Limit - Switching Selection (3330-01 hex).
For the Positive torque limit value (60E0 hex or 3330-03 hex) and Negative torque limit value
(60E1 hex or 3330-04 hex), the values of 60E0 hex and 60E1 hex are used if 60E0 hex and 60E1 hex
are mapped to a PDO. If they are not mapped to a PDO, the values of 3330-03 hex and 3330-04hex
are used.
The positive torque limit and negative torque limit are limited by the maximum torque regardless of the
settings.
7-8-3 Torque Limit Switching Method
Torque limit
switching
selection
Positive torque limit Negative torque limit
iPCL
*1
OFF
*1. iPCL = Logical OR of the general-purpose input signal (PCL) and P_CL (Controlword)
iPCL
*1
ON iNCL
*2
OFF
*2. iNCL = Logical OR of the general-purpose input signal (NCL) and N_CL (Controlword)
iNCL
*2
ON
0 Positive torque limit value
(60E0 hex or 3330-03 hex)
Negative torque limit value
(60E1 hex or 3330-04 hex)
1 Positive Torque Limit
Value 2
(3330-05 hex)
Positive torque limit
value
(60E0 hex or
3330-03 hex)
Negative Torque
Limit Value 2
(3330-06 hex)
Negative torque limit
value
(60E1 hex or
3330-04 hex)
2 Positive torque limit
value
(60E0 hex or
3330-03 hex)
Positive Torque Limit
Value 2
(3330-05 hex)
Negative torque limit
value
(60E1 hex or
3330-04 hex)
Negative Torque
Limit Value 2
(3330-06 hex)
 Loading...
Loading...

