9 Details on Servo Parameters
9 - 114
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
• Sets the delay time of the mechanical brake operation, etc.
• Outputs the timing signal of the external brake by the use of this delay time, when the Servo OFF is
performed during motor stop.
• This object is used for the time from when the Servo turns ON until the Brake Interlock Output (BKIR)
is turned ON (brake is released) and for the time from when the Brake Interlock Output (BKIR) is
turned OFF (brake is held) until the Servo turns OFF. For this purpose, set the brake attraction time
or release time, whichever is longer.
Sets the encoder dividing pulse output.
• Selects whether to enable or disable the encoder dividing pulse output function.
Description of Set Values
• Sets the number of output pulses per motor rotation.
Subindex 04 hex: Hardware Delay Time
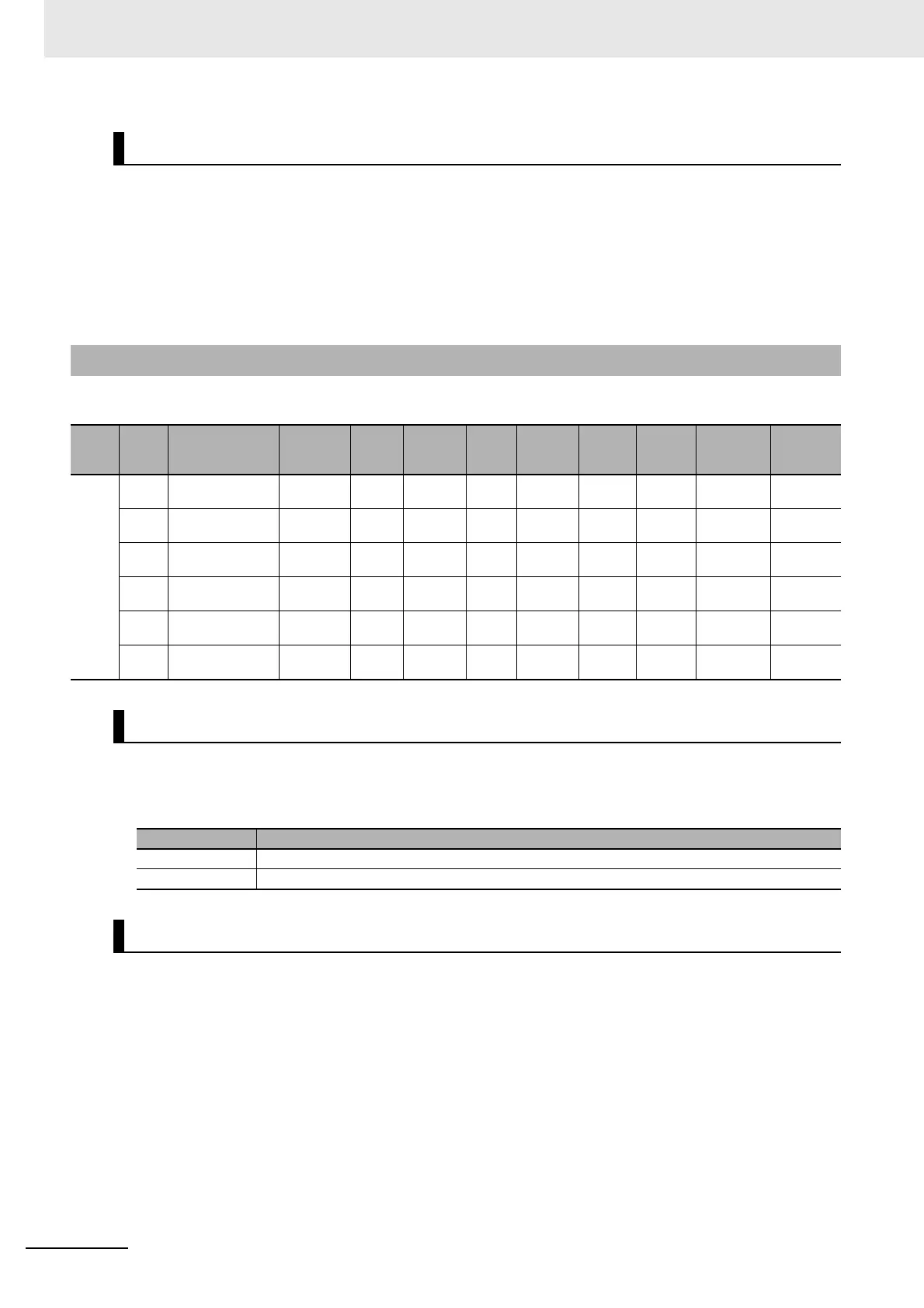
9-14-7 4620 hex: Encoder Dividing Pulse Output
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Complete
access
Modes of
operation
4620 --- Encoder Dividing
Pulse Output
--- --- --- --- --- --- --- Possible ---
00 Number of entries --- --- 04 hex --- 1 byte
(U8)
RO --- --- ---
01 Enable 0 to 1 --- 0 R 4 bytes
(INT32)
RW --- --- ---
02 Dividing Numera-
tor
0 to
2,097,152
--- 2,500 R 4 bytes
(INT32)
RW --- --- ---
03 Dividing Denomi-
nator
0 to
2,097,152
--- 0 R 4 bytes
(INT32)
RW --- --- ---
04 Output Reverse
Selection
0 to 1 --- 0 R 4 bytes
(INT32)
RW --- --- ---
Subindex 01 hex: Enable
Set value Description
0 Disabled
1 Enabled
Subindex 02 hex: Dividing Numerator
 Loading...
Loading...

