10 Operation
10 - 2
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
10-1 Operational Procedure
Perform installation and wiring correctly, and turn ON the power supply to check the operation of the
individual Servomotor and Servo Drive.
Then make the function settings as required according to the use of the Servomotor and Servo Drive.
If the objects are set incorrectly, there is a risk of unexpected motor operation, which can be dangerous.
Set the objects accurately according to the setting methods in this manual.
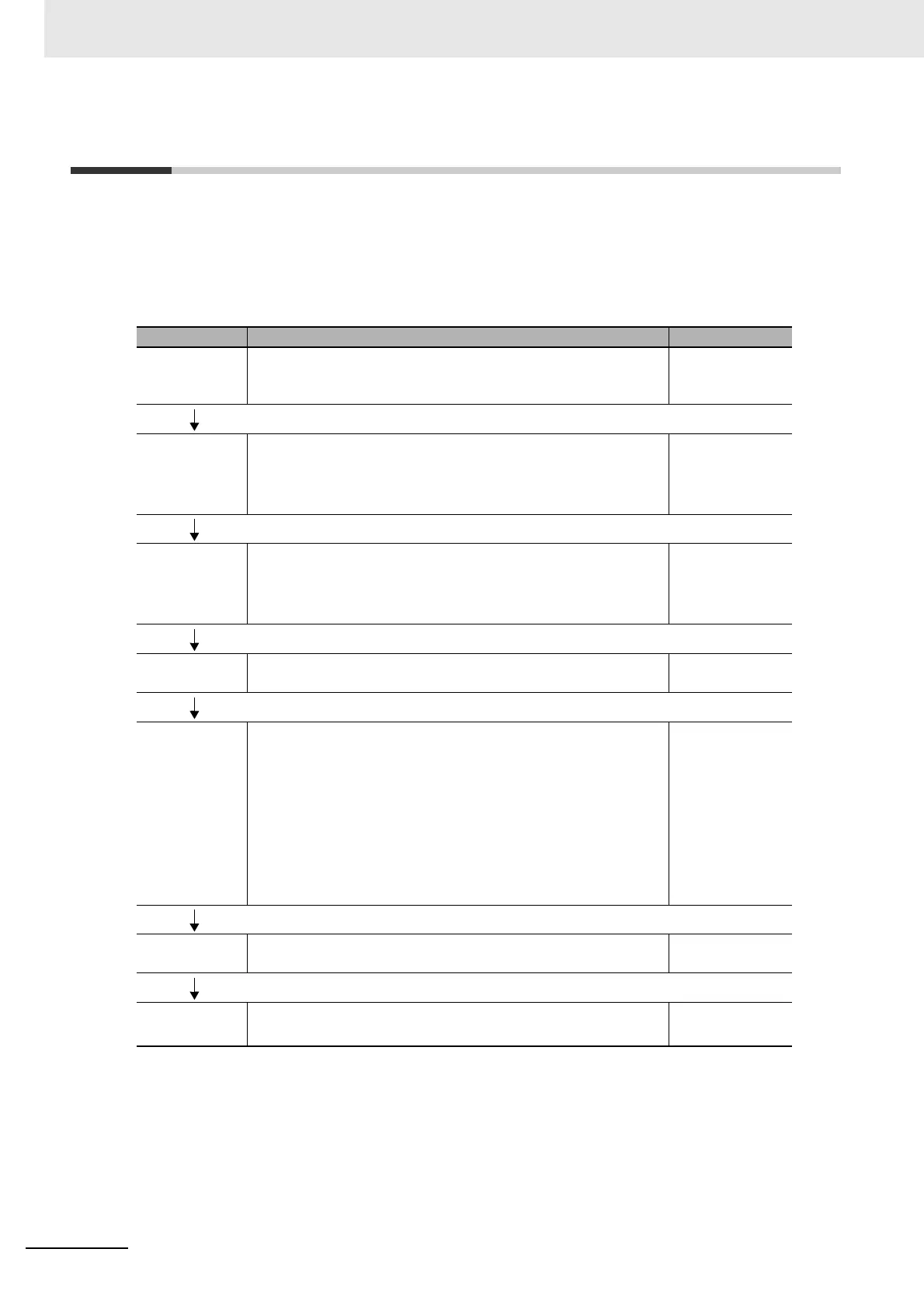
Item Description Reference
Installation and
mounting
Install the Servomotor and Servo Drive according to the installation
conditions. Do not connect the Servomotor to mechanical systems
before checking the operation without any load.
Section 4, 4-1
Wiring and con-
nections
Connect the Servomotor and Servo Drive to the power supply and
peripheral equipment.
Satisfy specified installation and wiring conditions, particularly for
models that conforms to the EU Directives.
Section 4, 4-2
Preparing for
operation
Check the necessary items and then turn ON the commercial
power supply.
Check on the display to see whether there are any internal errors
in the Servo Drive.
Section 10, 10-2
Function set-
tings
Set the objects related to the functions required for application
conditions.
Section 9
Test run
First, check motor operation without any load. Then turn the power
supply OFF and connect the Servomotor to mechanical systems.
When you use a Servomotor with an absolute encoder, set up the
absolute encoder.
Execute the Unit Restart or cycle the power supply, and check to
see whether protective functions, such as the immediate stop and
operational limits, operate properly.
Check operation at both low speed and high speed using the sys-
tem without a workpiece, or with dummy workpieces.
Section 10, 10-3
Adjustment
Manually adjust the set values of objects such as gain if neces-
sary.
Section 11
Operation
Operation can now be started.
If any problems should occur, refer to Section 12 Troubleshooting.
Section 12
 Loading...
Loading...

