9 - 13
9 Details on Servo Parameters
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
9-2 Common Control Objects
9
9-2-3 3002 hex: Optimized Parameters
• Sets the backlash compensation time constant in the position control. Refer to 7-5 Backlash Com-
pensation on page 7-20 for details.
• Sets the numerator of the electronic gear.
• Mirror object of 6091-01hex
• Sets the denominator of the electronic gear.
• Mirror object of 6091-02hex
• Refer to 7-7 Electronic Gear Function on page 7-29 for details.
• Gives the inertia ratio that is currently set.
• The value is updated automatically when Load Characteristic Estimation - Inertia Ratio Update
Selection (3B80-01 hex) is set to 1 (update with the estimation result).
This object is used to copy values, which are calculated in the Servo Drive, to the user setting area.
• The optimized parameters of Servo Drive are copied to the user setting area by the writing of 7970
6F63 hex. They are used as user set values.
• To save the data in the non-volatile memory, execute the Store Parameters (1010-01 hex).
• The Optimized Parameters refer to the objects listed below. All these objects are copied.
Subindex 04 hex: Backlash Compensation Time Constant
Subindex 05 hex: Motor Revolutions
Subindex 06 hex: Shaft Revolutions
Subindex 81 hex: Inertia Ratio Display
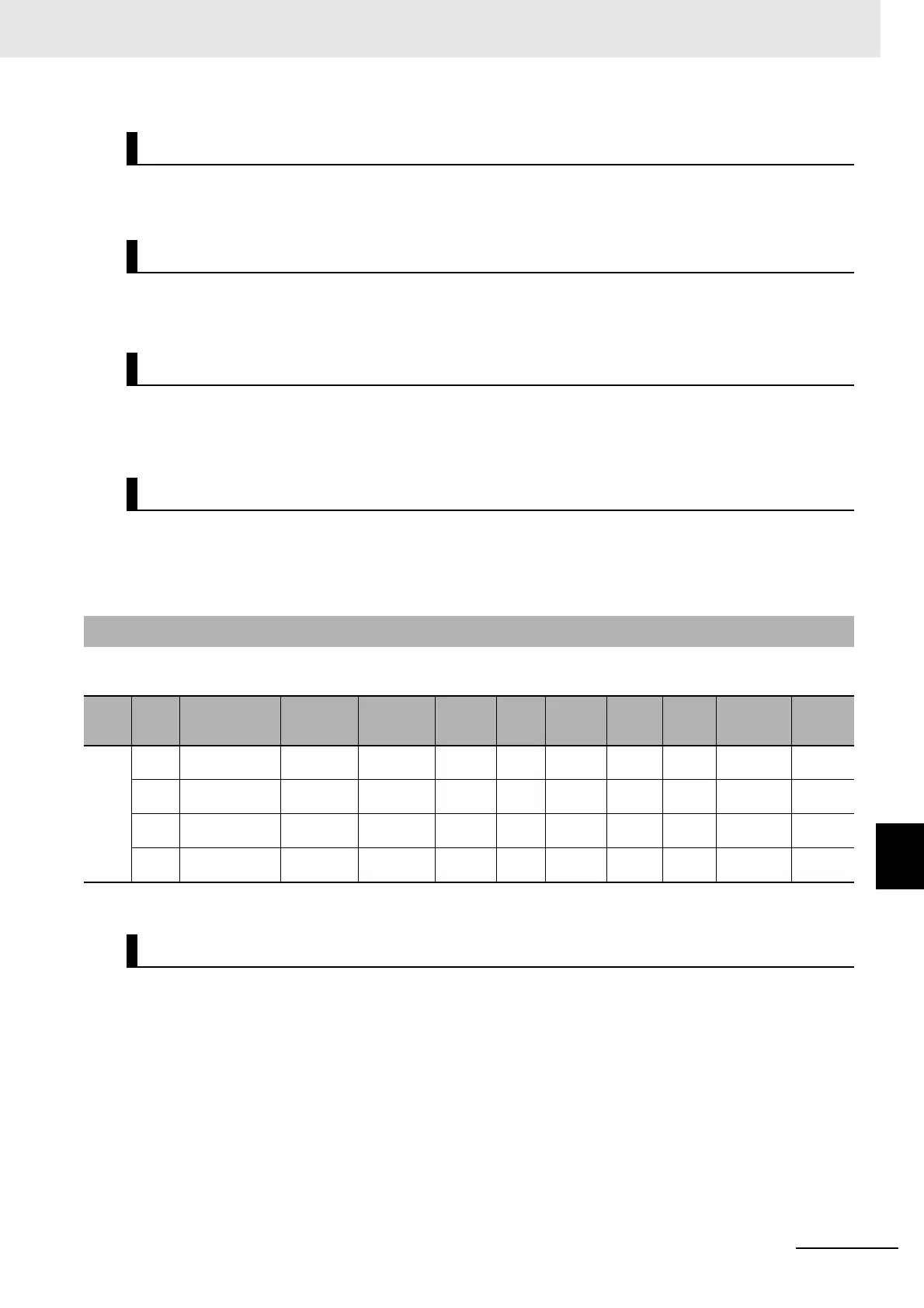
9-2-3 3002 hex: Optimized Parameters
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Complete
access
Modes
of oper-
ation
3002 --- Optimized
Parameters
--- --- --- --- --- --- --- Possible ---
00 Number of
entries
--- --- FF hex --- 1 byte
(U8)
RO --- --- ---
F1 Apply Parame-
ters
--- --- 000000
00 hex
A 4 bytes
(INT32)
W --- --- ---
FF Execution Sta-
tus
--- --- --- --- 4 bytes
(INT32)
RO --- --- ---
Subindex F1 hex: Apply Parameters
 Loading...
Loading...

