9 Details on Servo Parameters
9 - 26
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
Sets the Command Dividing Function which is enabled in the Cyclic synchronous position mode (csp)
or Cyclic synchronous velocity mode (csv).
In the free-run mode only, the setting is updated, and in the synchronous mode, the DC cycle time is
automatically applied as the interpolation time period.
Interpolation time period = Interpolation Time Period Value ×10
(Interpolation Time Index)
seconds.
• Selects whether to enable or disable the Command Dividing Function in the Cyclic synchronous
velocity mode (csv).
Description of Set Values
• Sets the value of the interpolation time period.
• Mirror object of 60C2-01 hex
• Sets the index of the interpolation time index period.
• Mirror object of 60C2-02 hex
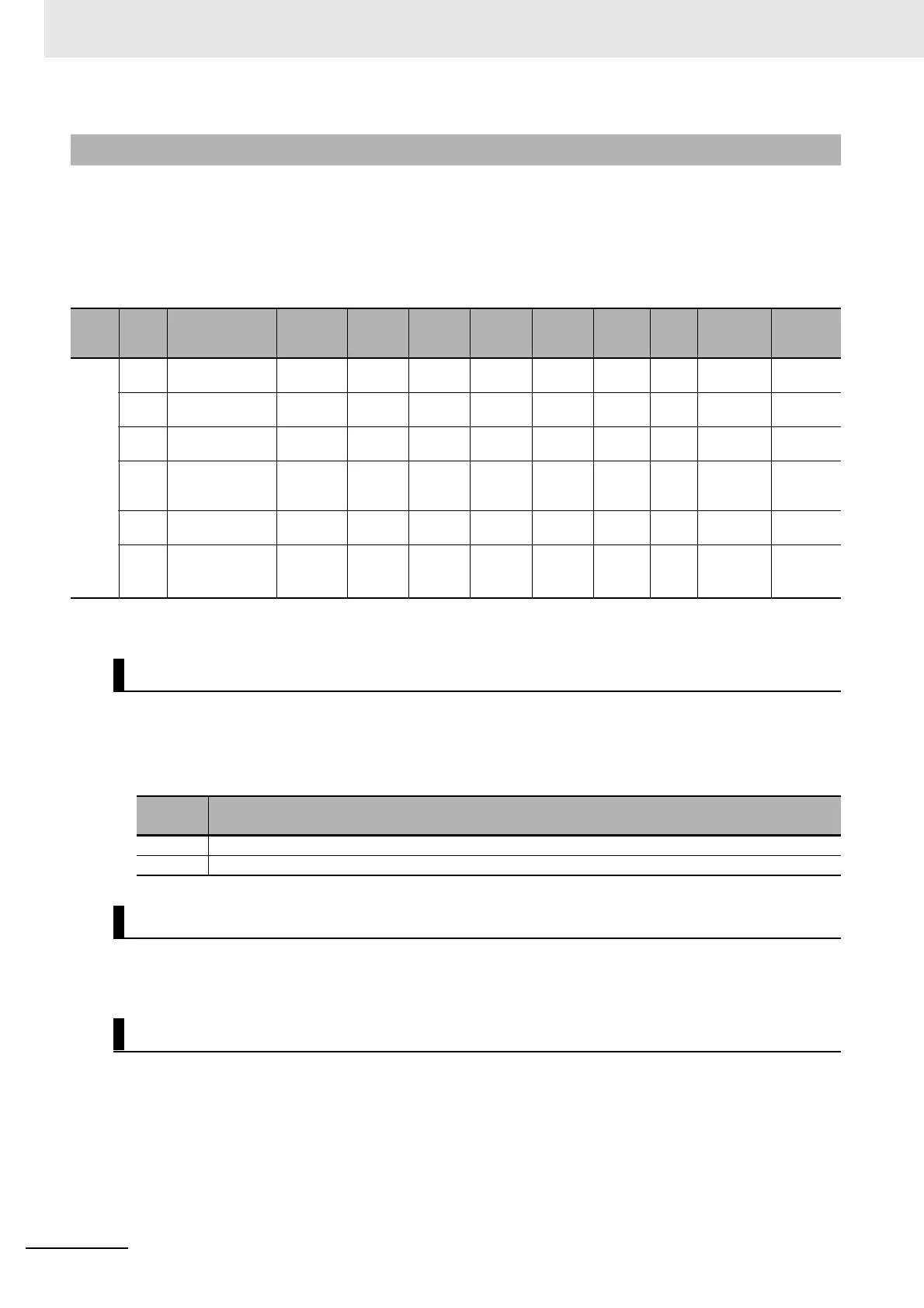
9-2-14 3041 hex: Command Dividing Function
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Complete
access
Modes of
operation
3041 --- Command Divid-
ing Function
--- --- --- --- --- --- --- Possible ---
00 Number of
entries
--- --- 10 hex --- 1 byte
(U8)
RO --- --- ---
01 Operation Selec-
tion in csv
0 to 1 --- 0 R 4 bytes
(INT32)
RW --- --- csv
02 Interpolation
Time Period
Value
0 to 255 --- 1 E 1 byte
(U8)
RW --- --- csp, csv
03 Interpolation
Time Index
-128 to 63 --- -3 E 1 byte
(INT8)
RW --- --- csp, csv
10 Interpolation
Method Selec-
tion in csp
*1
*1. This object is available for the unit version 1.2 or later.
0 to 1 --- 0 A 1 byte
(INT32)
RW --- --- csp
Subindex 01 hex: Operation Selection in csv
Set
value
Description
0 Disabled
1 Enabled
Subindex 02 hex: Interpolation Time Period Value
Subindex 03 hex: Interpolation Time Index
 Loading...
Loading...

