Appendices
A - 42
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
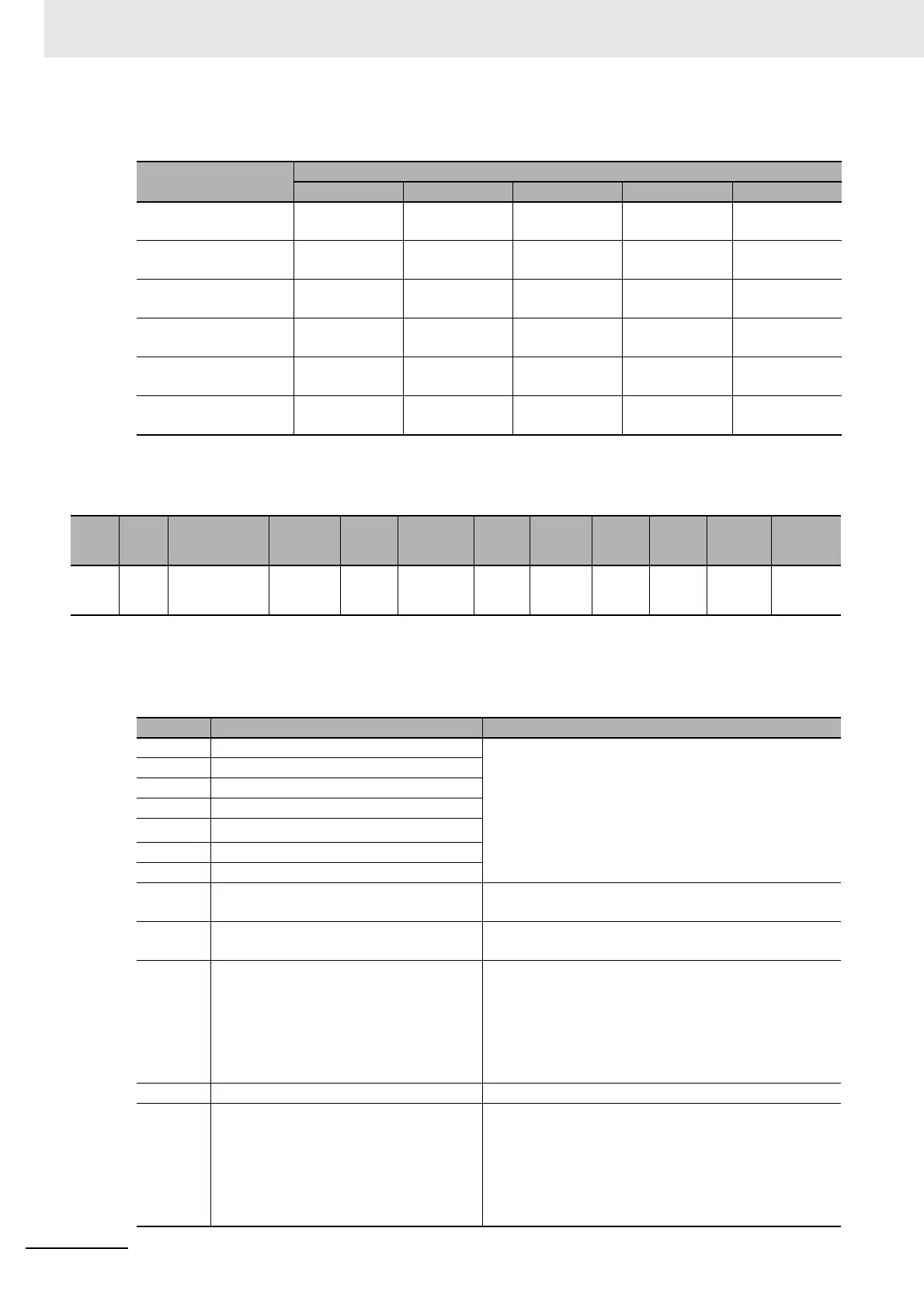
Description of bits specific to operation mode
• For details on how to use, refer to 6-6 Profile Position Mode on page 6-16 for the Profile position
mode, 6-7 Profile Velocity Mode on page 6-21 for the Profile velocity mode, and Homing Mode Spec-
ifications on page A-7 for the Homing mode.
• This object gives the present status of the Servo Drive (PDS).
Bit Descriptions
Modes of operation
Controlword
Bit 9 Bit 8 Bit 6 Bit 5 Bit 4
Profile position mode
(pp)
Change on
Set-point
Halt Abs/rel Change set
immediately
New set-point
Profile velocity mode
(pv)
--- Halt --- --- ---
Homing mode (hm) --- Halt --- --- Homing opera-
tion start
Cyclic synchronous
position mode (csp)
--- --- --- --- ---
Cyclic synchronous
velocity mode (csv)
--- --- --- --- ---
Cyclic synchronous
torque mode (cst)
--- --- --- --- ---
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes of
operation
6041 --- Statusword 0000 to
FFFF hex
--- 0000 hex --- 2 bytes
(U16)
RO TxPDO Not pos-
sible
csp, csv,
cst, pp,
pv, hm
Bit Name Description
0 Ready to switch on These bits give the status.
For details, refer to State Coding on page A-4.
1 Switched on
2 Operation enabled
3 Fault
4
Voltage enabled
*1
5 Quick stop
6 Switch on disabled
7 Warning This bit indicates that warning status exists. Operation
continues without changing the status.
8 Manufacturer specific This is a manufacturer specific bit. This bit is not used by
1S-series Servo Drives.
9 Remote This bit indicates that the Servo Drive is currently con-
trolled with Controlword.
After initialization is completed, this bit changes to 1
(remote).
When 0 (local) is given, it indicates that the support soft-
ware has the control right to the Servo Drive.
10 Operation mode specific This bit is specific to the operation mode.
11 Internal limit active This bit indicates that the limit function is in effect.
This bit changes to 1 when the limit function in the Servo
Drive is activated.
The limit function has four types of limits: the torque
limit, velocity limit, drive prohibition input, and software
position limit.
 Loading...
Loading...

