8 Safety Function
8-6
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
*1 Make sure that servo ON input is “OFF” when you return the input signals of safety inputs 1 and 2 to “ON.” If an
error exists in this state, be sure to clear the error when both safety inputs 1 and 2 have returned to “ON” state.
If either safety input 1 or 2 is executed with "OFF", an error occurs immediately. Also, depending on the
execution timing, an Other Error (Error No. 99.9) may occur.
If this error (Error No. 99.9) occurs, turn OFF and then ON the power again.
*2
An error exists in this state. The dynamic brake operates according to the Fault reaction option code (605E hex).
*3 This is a nomal servo OFF state. The dynamic brake operates according to the Disable operation option code (605C
hex).
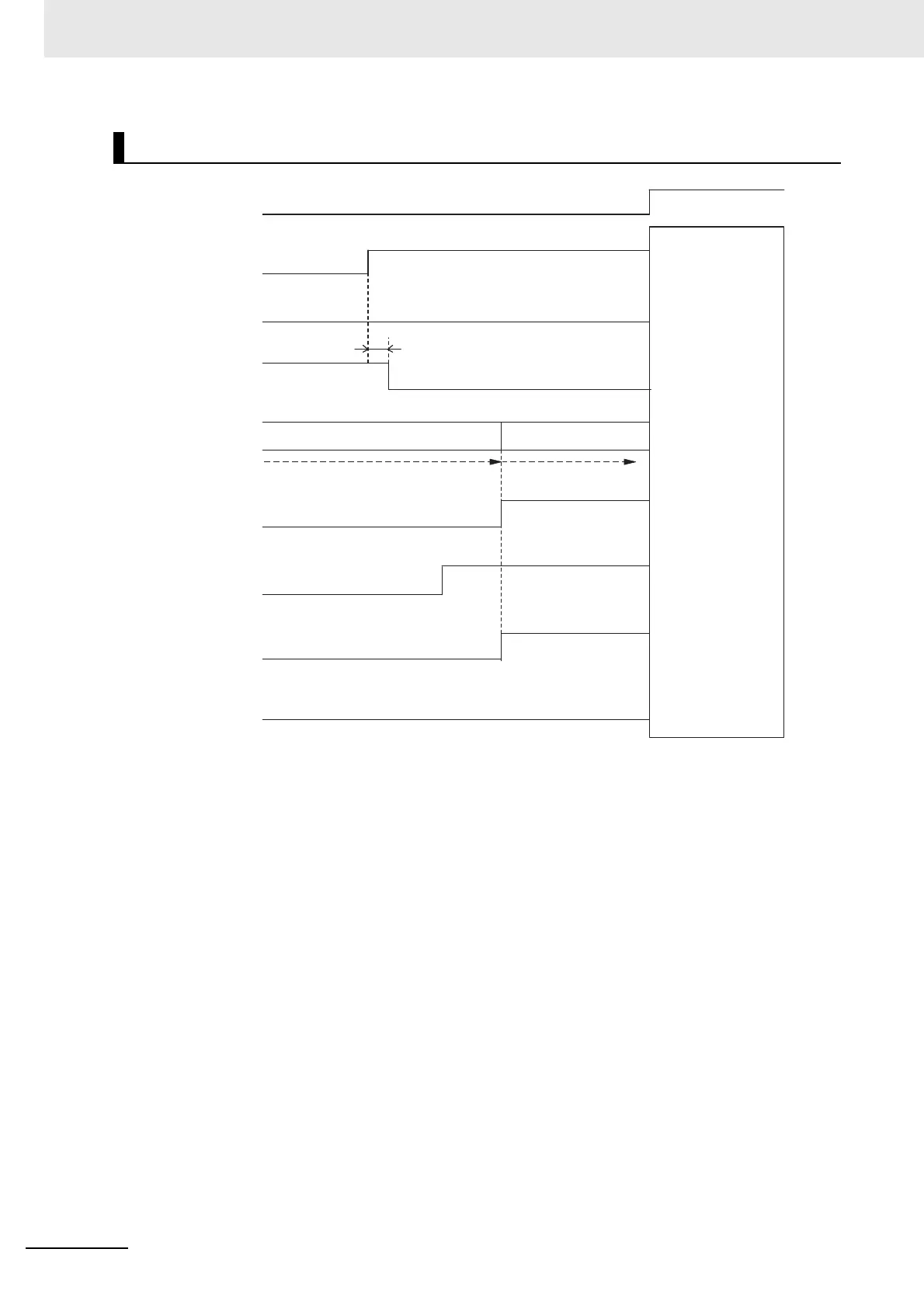
Timing of Return from Safety Status
STO status
Normal status
Servo ON
Servo OFF command
No power supply
Response time = 6 ms max.
READY
Error
Brake engaged
Reset
Normal
DB released/engaged
*2
Servo OFF
DB released/engaged
*3
Error
Safety input 1
Safety input 2
Servo ON /OFF
*1
Brake interlock
output (BKIR)
Motor power
is supplied.
Servo ready
completed output
(READY)
Error Output
(/ALM)
Error reset
input (RESET)
*1
Dynamic
brake relay
EDM output
ON
OFF
After the servo
turns ON, operation
will follow the
normal servo
ON/OFF operation
timing diagram.
For details, refer to
7-5 Brake Interlock.

 Loading...
Loading...

