9-13
9 Servo Parameter Objects
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
9-2 Gain Settings
9
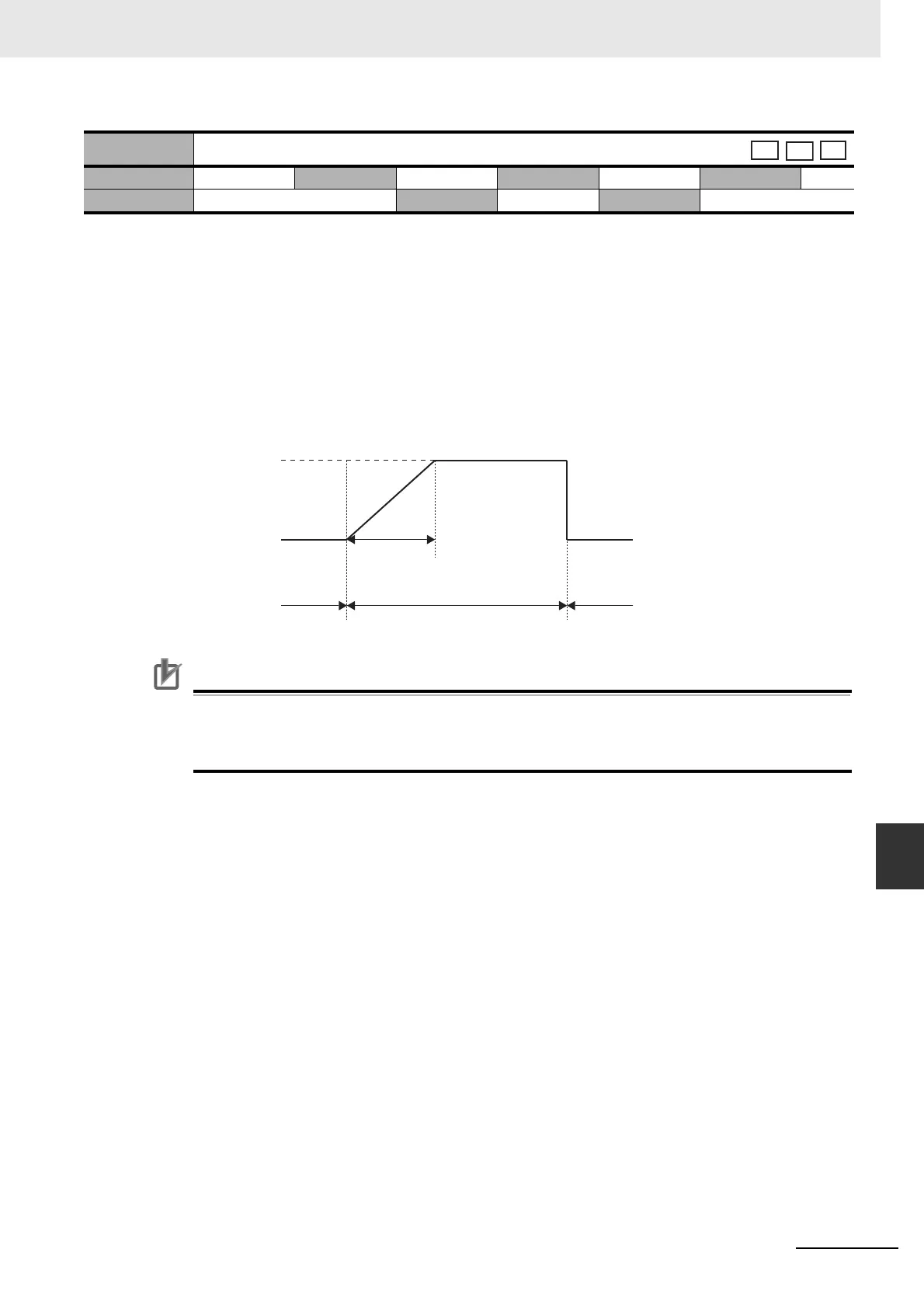
• Torque fluctuations or vibration will occur if the position loop gain is changed too quickly during
position control or fully-closed control. To suppress these, set a Position Gain Switching Time
(3119 hex).
• By setting the Position Gain Switching Time (3119 hex), the gain will be switched gradually when
there is a large change in the position loop gain.
• If there is a large difference between Position Loop Gain 1 (3100 hex) and Position Loop Gain 2
(3105 hex), set the Position Gain Switching Time (3119 hex).
• When the position loop Gain 1 increases, the gain changes in the set time.
Position Loop Gain 1 < Position Loop Gain 2
Precautions for Correct UsePrecautions for Correct Use
When the position loop gain is switched to a smaller value, Position Gain Switching Time
(3119 hex) is ignored and the gain is switched immediately.
In the above figure, this operation occurs when switching from Gain 2 to Gain 1.
3119 hex
Position Gain Switching Time
Setting range 0 to 10000 Unit 0.1 ms
Default setting
33
Data attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
hm
Position Gain
Switching Time (ms) (3119 hex)
Position
Loop Gain 1
Position
Loop Gain 2
Position
Loop Gain 1
Position
Loop Gain 1
Position
Loop Gain 2

 Loading...
Loading...

