9-63
9 Servo Parameter Objects
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
9-8 Linear Motor Objects
9
Precautions for Correct UsePrecautions for Correct Use
After applying a force command, the command force stops and the motor decelerates. After that,
the motor comes to a stop momentarily but may move in a reverse direction due to cogging or
other phenomena.
To prevent the motor from being judged as stopped in a wrong timing when it has not come to a
complete stop in this way, be sure to set the Magnetic Pole Position Estimation Movement for
Stop Judgment (3925 hex) and the Magnetic Pole Position Estimation Time for Stop Judgment
(3926 hex).
• Set the limit time for judging motor stop during magnetic pole position estimation.
• This time represents the time elapsed after the stoppage of a force command until the motor comes
to a complete stop.
• If the motor has not been judged as stopped when the set limit time expires, a Magnetic Pole Position
Estimation Error 2 (Error No. 61.1) will occur.
• This setting is enabled only when the Magnetic Pole Detection Method (3920 hex) is set to 2
(Magnetic pole position estimation method).
Precautions for Correct UsePrecautions for Correct Use
If you set a large value in the Magnetic Pole Position Estimation Force Command (3923 hex) or
Magnetic Pole Position Estimation Maximum Movement (3924 hex), it may take a long time until
the motor stops because the motor speed when a force command stops will become high. The
motor may take a long time to stop due to a low kinetic friction. In these cases, increase the set
value.
• Set the filter time constant for force commands during magnetic pole position estimation.
• When the set value is 0, the filter is disabled and commands will be processed as step commands.
• This setting is enabled only when the Magnetic Pole Detection Method (3920 hex) is set to 2
(Magnetic pole position estimation method).
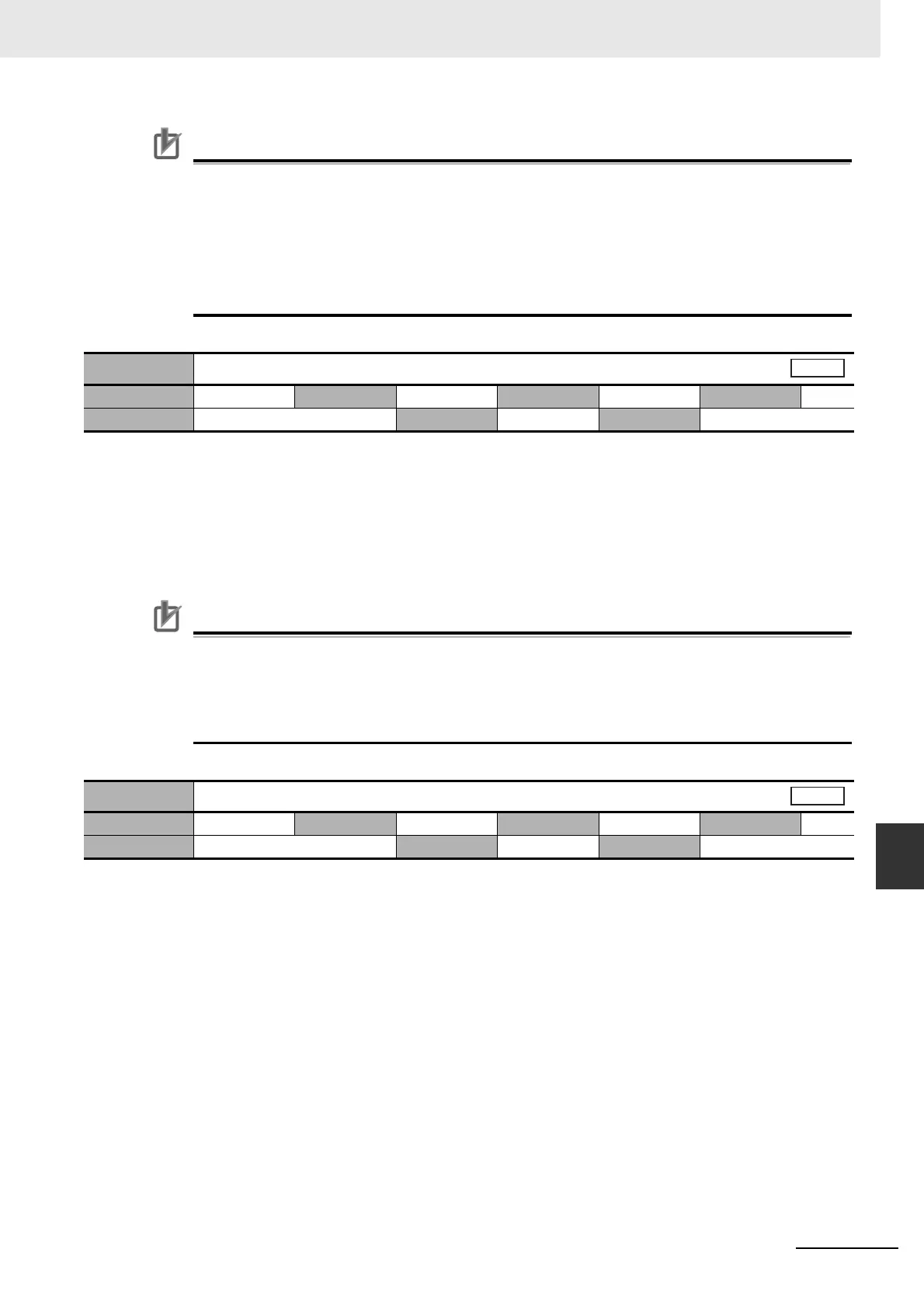
3927 hex
Magnetic Pole Position Estimationn Time Limit for Stop
Setting range 0 to 32767 Unit ms
Default setting
1000
Data attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
3928 hex
Magnetic Pole Position Estimation Force Filter Time Constant
Setting range 0 to 2500 Unit 0.01 ms
Default setting
100
Data attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.

 Loading...
Loading...

