Appendicies
A-14
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
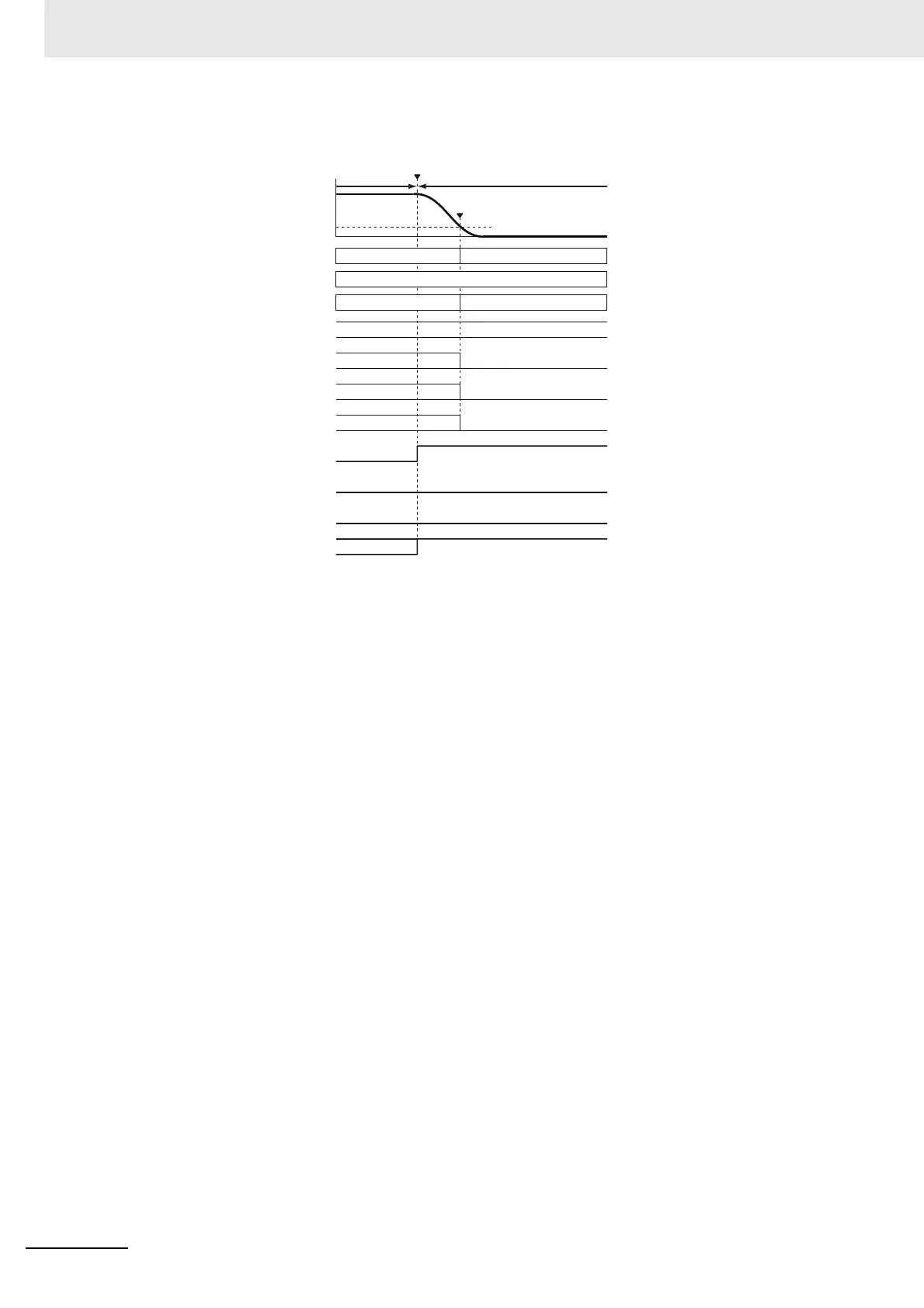
(e) Example of Servo OFF during Operation in pp
*1 When the servo is turned OFF, a deceleration stop starts and 6061 hex continues to show the same mode as
the mode of operation (pp) specified in 6060 hex.
*2 After the motor stops, No mode assigned is shown by 6061 hex.
Note The operation during the interval from A to B for drive prohibition and main circuit power OFF is the same as
when the servo is turned OFF.
6061 hex
30 mm/s
pp
Operation enabled Switched on
No mode assigned
0
0
6060 hex pp
(VCMP)
(NEAR)
1
01
0
(Target position ignored)
0
0
1
0/1
*1
0/1
(VLIM)
(DEN)
(Following error)
(Target reached)
A
*2
B
(Remote)
0/1
0/1
6041 hex: Bit 10
6041 hex: Bit 12
6041 hex: Bit 13
4000 hex: Bit 1
4000 hex: Bit 4
4000 hex: Bit 7
4000 hex: Bit 8
Actual speed
Servo ON Servo OFF
PDS state
6041 hex: Bit 9

 Loading...
Loading...

