Appendicies
A-34
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
• This is the mapping for an application that switches between Cyclic synchronous position mode (csp)
and Cyclic synchronous velocity mode (csv).
• Touch probe and force limit are available.
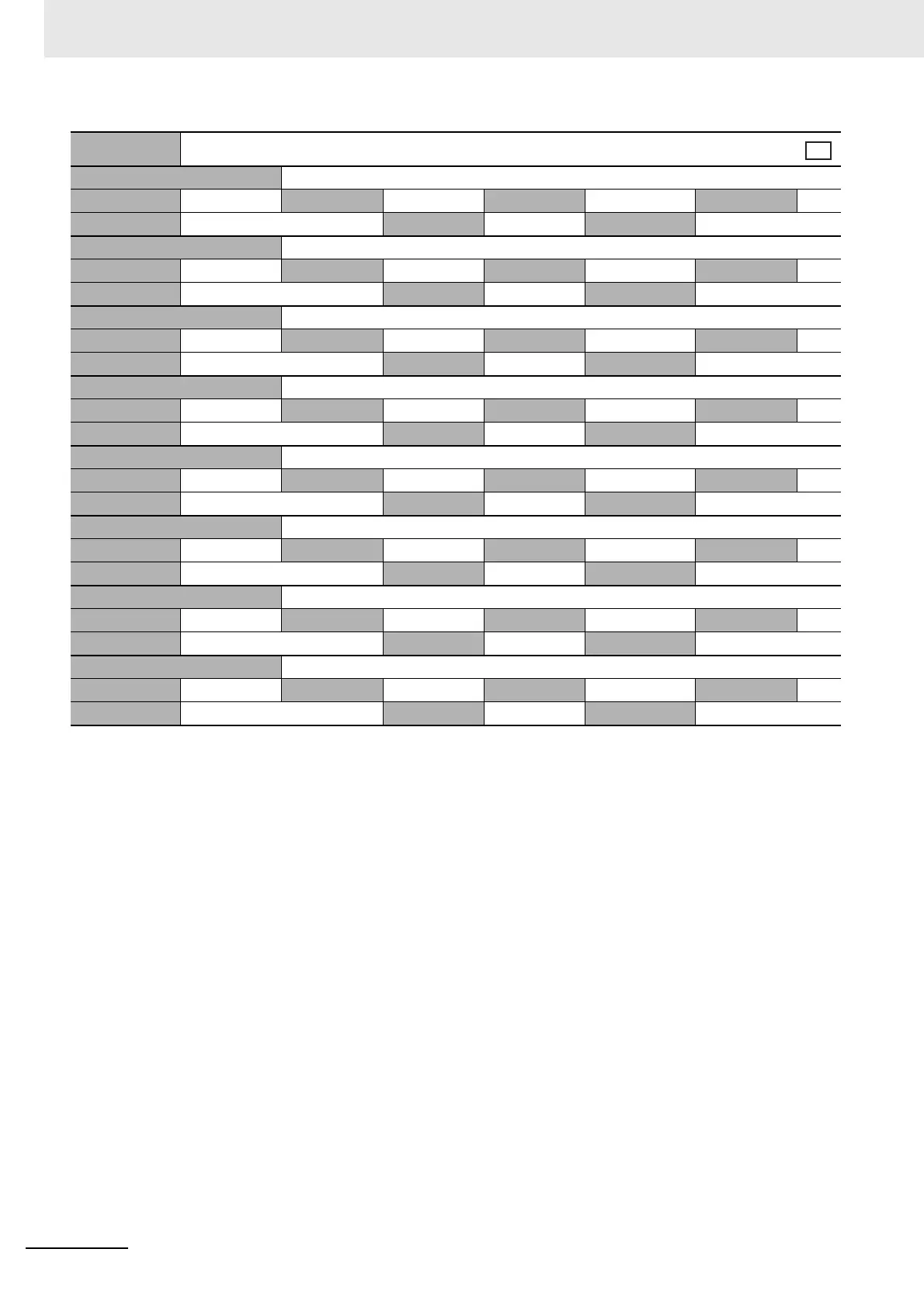
1703 hex
260th receive PDO Mapping
Sub-index 00 hex Number of objects in this PDO
Range Unit Default 07 hex Attribute
Size 1 byte (U8) Access RO PDO map Not possible
Sub-index 01 hex PDO entry 1 (1st Output Object to be mapped)
Range Unit Default 6040 0010 hex Attribute
Size 4 bytes (U32) Access RO PDO map Not possible
Sub-index 02 hex PDO entry 2 (2nd Output Object to be mapped)
Range Unit Default 607A 0020 hex Attribute
Size 4 bytes (U32) Access RO PDO map Not possible
Sub-index 03 hex PDO entry 3 (3rd Output Object to be mapped)
Range Unit Default 60FF 0020 hex Attribute
Size 4 bytes (U32) Access RO PDO map Not possible
Sub-index 04 hex PDO entry 4 (4th Output Object to be mapped)
Range Unit Default 6060 0008 hex Attribute
Size 4 bytes (U32) Access RO PDO map Not possible
Sub-index 05 hex PDO entry 5 (5th Output Object to be mapped)
Range Unit Default 60B8 0010 hex Attribute
Size 4 bytes (U32) Access RO PDO map Not possible
Sub-index 06 hex PDO entry 6 (6th Output Object to be mapped)
Range Unit Default 60E0 0010 hex Attribute
Size 4 bytes (U32) Access RO PDO map Not possible
Sub-index 07 hex PDO entry 7 (7th Output Object to be mapped)
Range Unit Default 60E1 0010 hex Attribute
Size 4 bytes (U32) Access RO PDO map Not possible

 Loading...
Loading...

