A-59
Appendicies
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
A-1 CiA402 Drive Profile
App
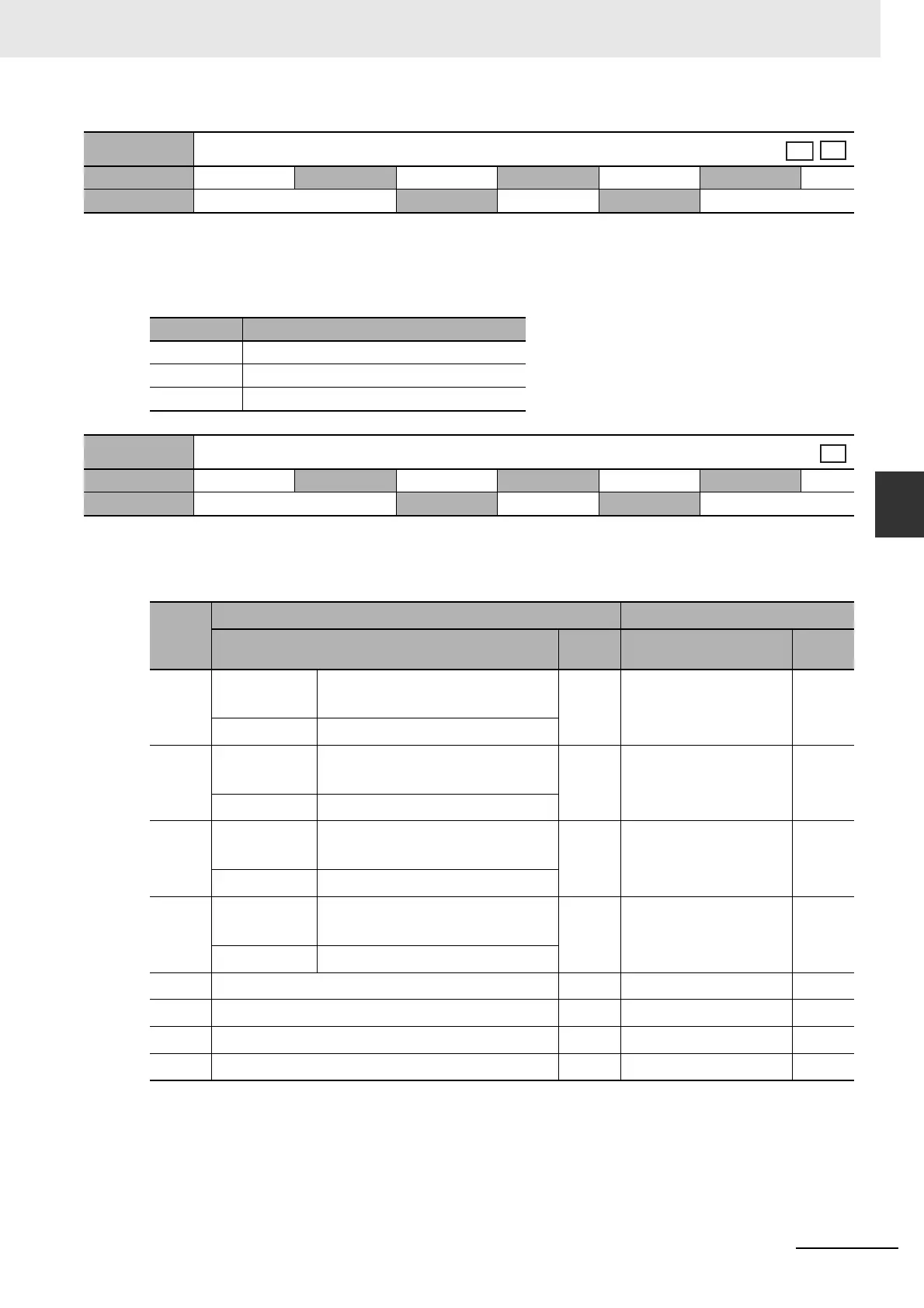
A-1-12 Servo Drive Profile Object
• This object sets the stop method when bit 8 (Halt) in Controlword (6040 hex) is set to 1 during the
Homing mode (hm).
Description of Settings
• This object sets the behavior when an error occurs.
Description of Settings
*1 Decelerating is the time between when the motor is running and when the motor speed reaches
30 mm/s or less. Once the motor reaches 30 mm/s or less and moves to the after-stop status, subsequent
operation is based on the after-stop status regardless of the motor speed.
605D hex
Halt option code
Range 1 to 3 Unit Default 1 Attribute B
Size 2 bytes (INT16) Access RW PDO map Not possible
Set value Description
1 Profile deceleration (6084 hex)
2 Not supported
3 Immediate stop
605E hex
Fault reaction option code
Range 7 to 0 Unit Default 1 Attribute B
Size 2 bytes (INT16) Access RW PDO map Not possible
Set
value
Decelerating
*1
After stopping
Deceleration method Error
Operation after
stopping
Error
7
Operation A
*2
Immediate Stop
*3
Immediate Stop Force = 3511 hex
Clear
*4
Free
Clear
*4
Operation B
*2
Free-run
6
Operation A
*2
Immediate Stop
*3
Immediate Stop Force = 3511 hex
Clear
*4
Free
Clear
*4
Operation B
*2
Dynamic brake operation
5
Operation A
*2
Immediate Stop
*3
Immediate Stop Force = 3511 hex
Clear
*4
Dynamic brake operation
Clear
*4
Operation B
*2
Free-run
4
Operation A
*2
Immediate Stop
*3
Immediate Stop Force = 3511 hex
Clear
*4
Dynamic brake operation
Clear
*4
Operation B
*2
Dynamic brake operation
3 Dynamic brake operation
Clear
*4
Free
Clear
*4
2 Free-run
Clear
*4
Dynamic brake operation
Clear
*4
1 Dynamic brake operation
Clear
*4
Dynamic brake operation
Clear
*4
0 Free-run
Clear
*4
Free
Clear
*4
hm
All

 Loading...
Loading...

