Appendicies
A-138
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
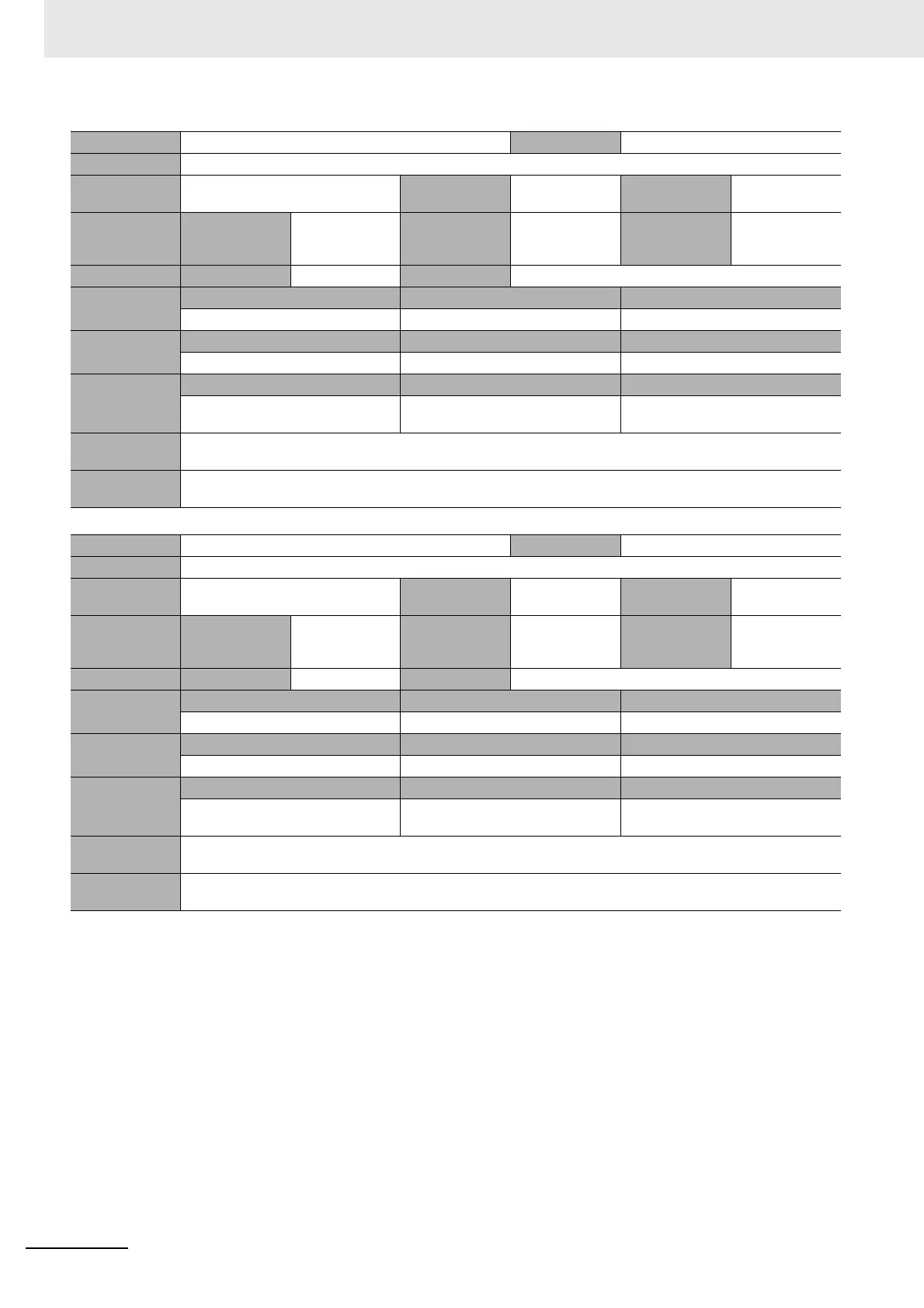
Event name Object Setting Error 1 Event code 384F0000 hex
Meaning The electronic gear ratio exceeded the allowable range.
Source EtherCAT Master Function Module Source details Slave Detection
timing
Continuously
Error attributes Level Minor fault Recovery Error reset (after
cycling slave
power)
Log category System
Effects User program Continues. Operation Power drive circuit is OFF for relevant slave.
Indicators EtherNet/IP NET RUN EtherNet/IP NET ERR EtherNet/IP LINK/ACT
--- --- ---
System-defined
variables
Variable Data type Name
None --- ---
Cause and
correction
Assumed cause Remedy Prevention
The electronic gear ratio exceeded
the allowable range.
Correct the electronic gear ratio to
between 1/1,000 and 1,000.
Set the electronic gear ratio to
between 1/1,000 and 1,000.
Attached
information
None
Precautions/
Remarks
“93” is displayed on the Servo Drive front panel and F093 is given as the AlarmCode (4001 hex).
Event name Object Setting Error 2 Event code 38500000 hex
Meaning External encoder ratio exceeded the allowable range.
Source EtherCAT Master Function Module Source details Slave Detection
timing
Continuously
Error attributes Level Minor fault Recovery Error reset (after
cycling slave
power)
Log category System
Effects User program Continues. Operation Power drive circuit is OFF for relevant slave.
Indicators EtherNet/IP NET RUN EtherNet/IP NET ERR EtherNet/IP LINK/ACT
--- --- ---
System-defined
variables
Variable Data type Name
None --- ---
Cause and
correction
Assumed cause Remedy Prevention
External encoder ratio exceeded the
allowable range.
Correct the external encoder ratio to
between 1/40 and 160.
Set the external encoder ratio to
between 1/40 and 160.
Attached
information
None
Precautions/
Remarks
“93” is displayed on the Servo Drive front panel and F293 is given as the AlarmCode (4001 hex).

 Loading...
Loading...

