5-2
5-1 Position Control
5
Operating Functions
Related Parameters
The main functions provided by the parameters related to position control are described in the
following table.
Reference
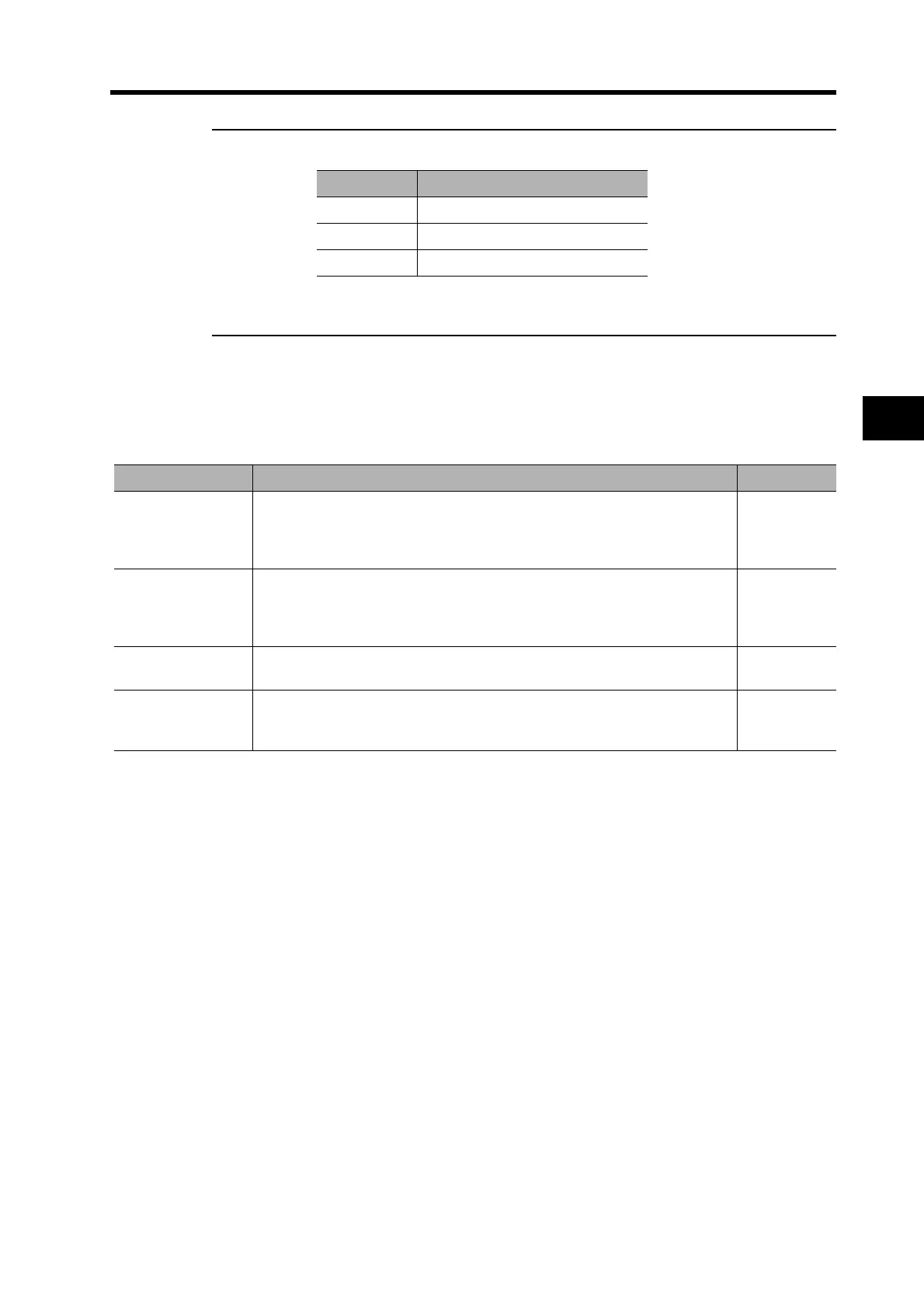
The Control Mode Selection (Pn02) is set as follows.
To perform position control, select 0 (high-response position control) or 2
(advanced position control) for the control mode.
Setting Control mode
0 High-Response Position Control
1 Internally Set Speed Control
2 Advanced Position Control
Function Explanation Reference
Gain Switching
The Gain Switching Input (GSEL) is used when the Zero Speed Designation/
Torque Limit Switch (Pn06) is set to a value other than 2. The Gain Switching
Input is used to switch between PI and P operation or to switch between gain
1 and gain 2.
Page 5-13
Torque Limit Switch
The Torque Limit Switch Input (TLSEL) is used when the Zero Speed Desig-
nation/Torque Limit Switch (Pn06) is set to 2. The following parameters are
switched: Overspeed Detection Level, Torque Limit, and Deviation Counter
Overflow Level.
Page 5-15
Damping Control
Damping control can be used to reduce vibration when using a low-rigidity
mechanism or equipment whose ends tend to vibrate.
Page 7-23
Realtime
Autotuning
Autotuning automatically estimates the load inertia of the machine in realtime
and sets the optimal gain. The adaptive filter automatically suppresses vibra-
tion caused by resonance.
Page 7-3

 Loading...
Loading...



