7-1
7-1 Gain Adjustment
7
Adjustment Functions
7Adjustment Functi ons
7-1 Gain Adjustment
SMARTSTEP 2-Series Servo Drive has realtime autotuning and autotuning functions.
With these functions, gain adjustments can be made easily even by those who use a servo system
for the first time. If autotuning cannot be used, use manual tuning.
Purpose of the Gain Adjustment
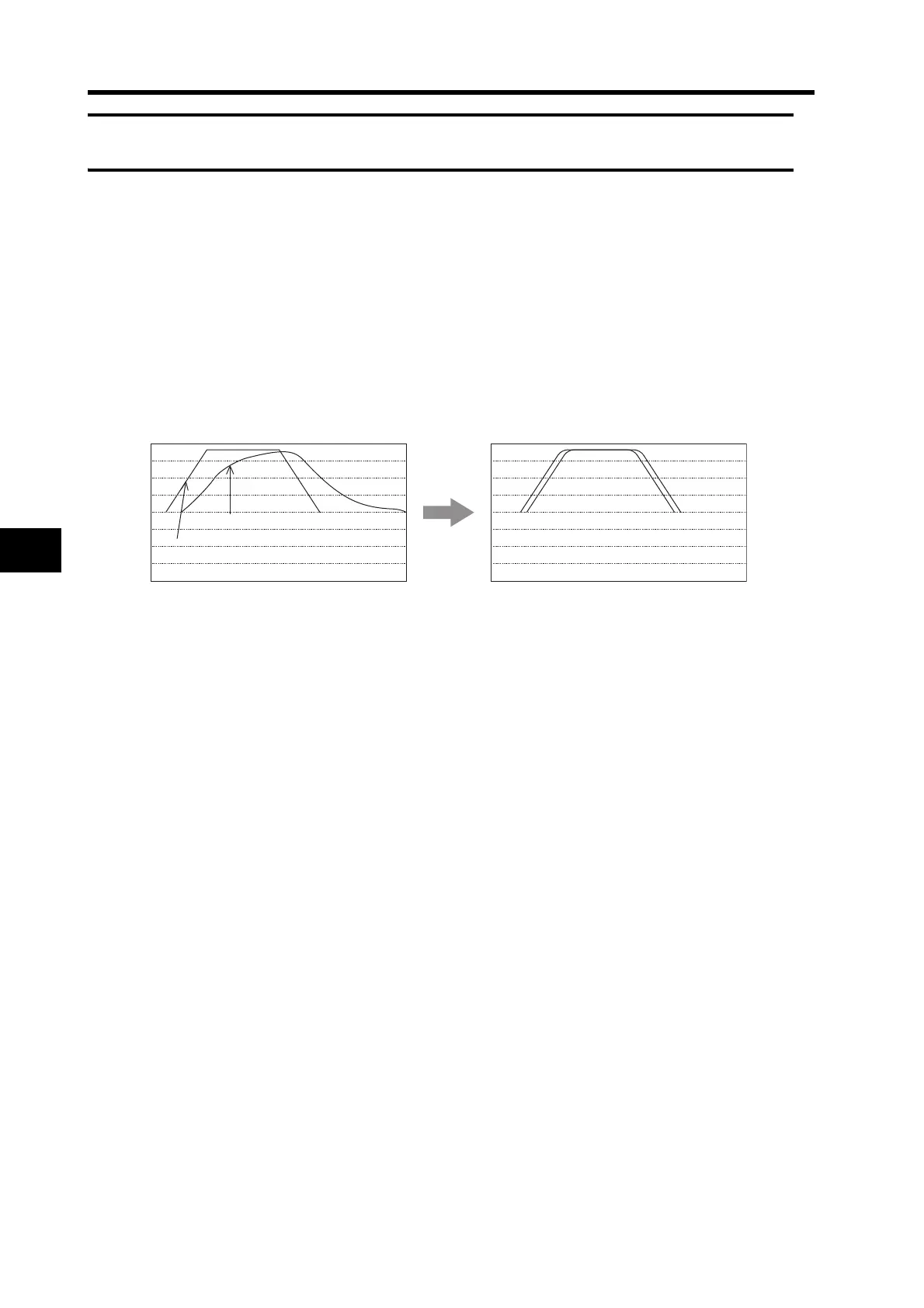
The Servomotor must operate in response to commands from the Servo Drive with minimal time
delay and maximum reliability. The gain is adjusted to make the Servomotor operation follow the
commands as strictly as possible to the operations specified by the commands, and to maximize
the performance of the mechanical system.
Gain Adjustment Methods
The SMARTSTEP 2-Series Servo Drive has three gain adjustment methods: realtime autotuning,
autotuning, and manual tuning.
Realtime Autotuning
Realtime autotuning estimates the load inertia of the mechanical system in realtime, and
automatically sets the optimal gain according to the estimated result.
Realtime autotuning includes the adaptive filter function that estimates the resonance frequency
from the vibrating component in the motor speed, and automatically sets the notch filter coefficient
to suppress the resonance point vibration.
Autotuning
Autotuning operates the Servomotor according to the operating pattern set in the Autotuning
Operation Setting (Pn25), estimates the load inertia through the torque required, and automatically
sets the optimal gain.
Manual Tuning
Use manual tuning when autotuning cannot be performed due to the restrictions of the operating
pattern or load conditions, or when maximum responsiveness needs to be obtained for individual
loads.
The default setting is for manual tuning.
Actual Servomotor speed
Command speed

 Loading...
Loading...



