5-14
5-7 Gain Switching
5
Operating Functions
Related Parameters
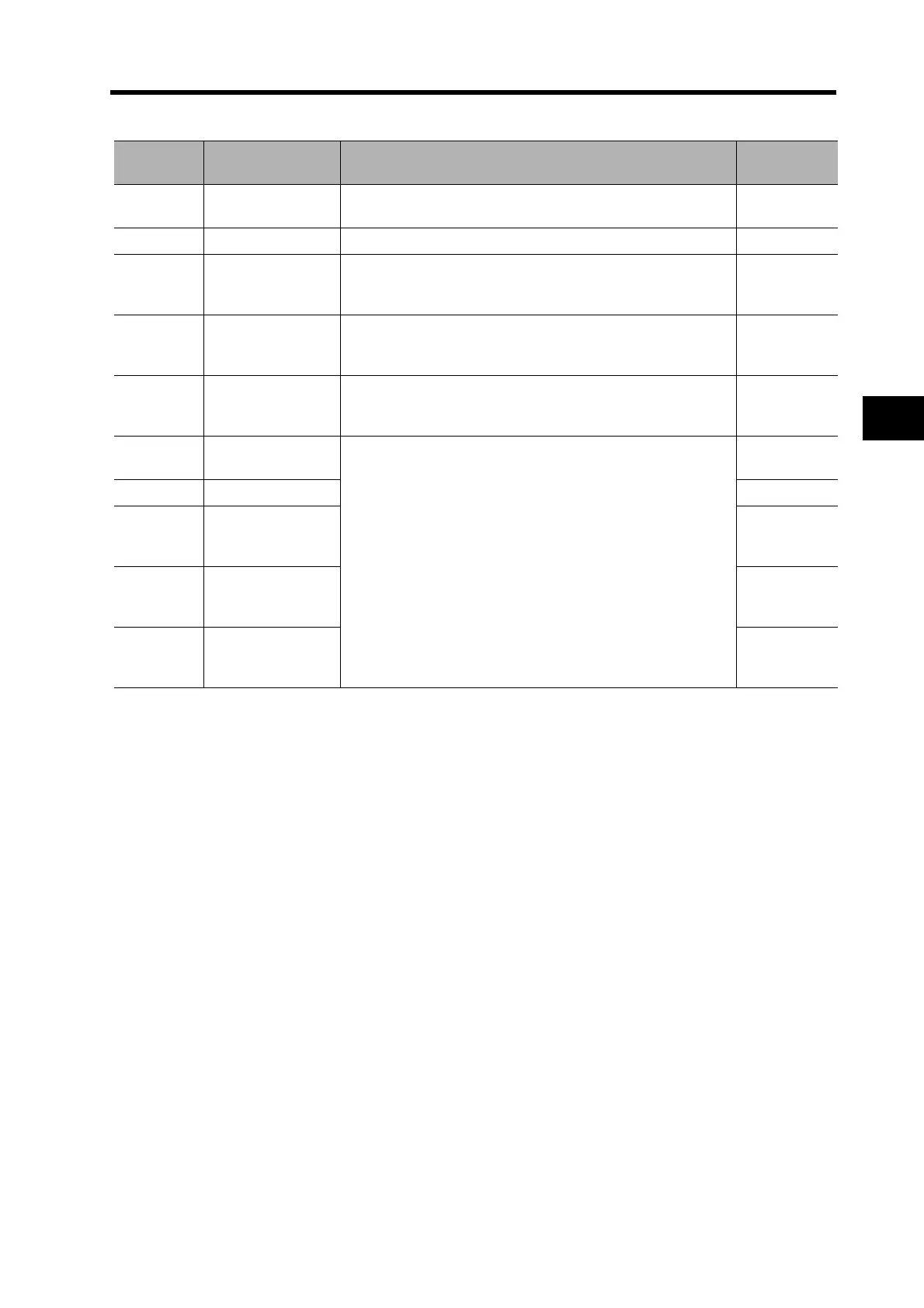
Parameter
No.
Parameter name Explanation Reference
Pn10 Position Loop Gain
Set the position control system responsiveness. The higher
the setting, the shorter the positioning time.
Page 5-36
Pn11 Speed Loop Gain Set the speed loop responsiveness. Page 5-37
Pn12
Speed Loop
Integration Time
Constant
The integration constant is included in the speed loop. This pa-
rameter functions to quickly eliminate minor speed deviations
after stopping. The lower the setting, the faster the action.
Page 5-37
Pn13
Speed Feedback
Filter Time
Constant
The encoder signal is converted to the speed signal via the low
pass filter. Noise from the Servomotor can be reduced by in-
creasing the setting. Normally set it to 4 or less.
Page 5-37
Pn14
Torque Command
Filter Time
Constant
Set to adjust the primary lag filter time constant for the torque
command section. Page 5-38
Pn18
Position Loop Gain
2
These settings are for gain 2.
These parameters function in the same way as the parameters
described above.
Page 5-39
Pn19 Speed Loop Gain 2 Page 5-39
Pn1A
Speed Loop
Integration Time
Constant 2
Page 5-39
Pn1B
Speed Feedback
Filter Time
Constant 2
Page 5-39
Pn1C
Torque Command
Filter Time
Constant 2
Page 5-39

 Loading...
Loading...



