242
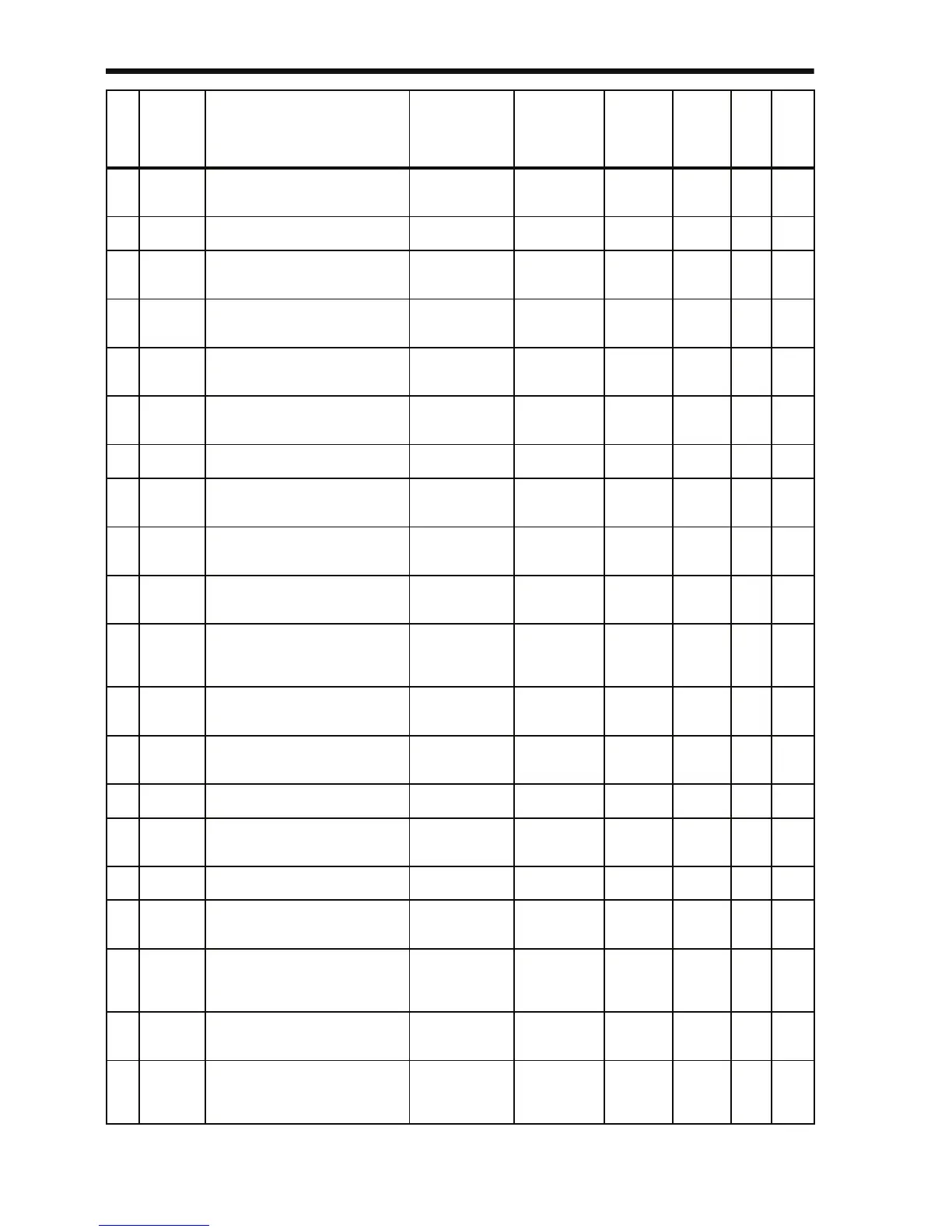
133 0185 PID Offset Adjustment −100% to
100%
1% 0% Yes 162
134 0186 Upper Limit of Integral Values 0% to 100% 1% 100% Yes 161
135 0187 Primary Delay Time Constant
for PID Output
0.0 to 10.0 s 0.1 s 0.0 s Yes 162
136 0188 Selection of PID Feedback
Loss Detection
0 to 2 - 0 No 163
137 0189 PID Feedback Loss Detection
Level
0% to 100% 1% 0% No 163
138 018A PID Feedback Loss Detection
Time
0.0 to 25.5 s 0.1 s 1.0 s No 163
139 018B Autotuning Selection 0 to 2 - 0 No 66
140 018C Motor 2 Maximum Output Fre-
quency
50.0 to
400.0 Hz
0.1 Hz 50.0 Hz No 99
141 018D PTC Thermistor Input Motor
Overheat Protection Selection
0 to 7 - 0
No 139
142 018E Motor Temperature Input Filter
Time Constant
0.0 to 10.0 s 0.1 s 0.2 s Yes 139
143 018F Sequence Input Redundant
Reading Selection (Stop Posi-
tion Control Selection)
0 to 2 - 0 No 108
144 0190 Stop Position Control Com-
pensation Gain
0.50 to 2.55 0.1 1.00 No 108
145 0191 Bi-directional Function Selec-
tion
0, 1 - 0 No 163
146 0192 Frequency Offset Selection 0 to 29 - 0 No 85
147 0193 Motor 2 Maximum Voltage
Output Frequency
0.2 to
400.0 Hz
0.1 Hz 50.0 Hz No 99
148 0194 UV fault storage selection 0,1 - 0 No -
149 0195 Pulse Train Input Scaling 100 to 3300 1 = 10 Hz 2500
(25 kHz)
No 128
150 0196 Pulse Monitor Output
Frequency Selection
0, 1, 6, 12, 24,
36, 40 to 45,
50
-0No92
151 0197 MEMOBUS Timeover
Detection
0 to 4 - 0 No 143
152 0198 MEMOBUS Frequency
Reference and Frequency
Monitor Unit
0 to 3 - 0 No 143
No. Register
No. for
Trans-
mission
Name Setting Range Setting Unit Factory
Setting
Change
during
Opera-
tion
User
Set-
ting
Ref.
Page