Parker Hannifin S.p.A. - S.B.C. Division HPD N User’s Manual
103
17. Can Bus Connector
The Can bus connector is a 9-pin male connector.
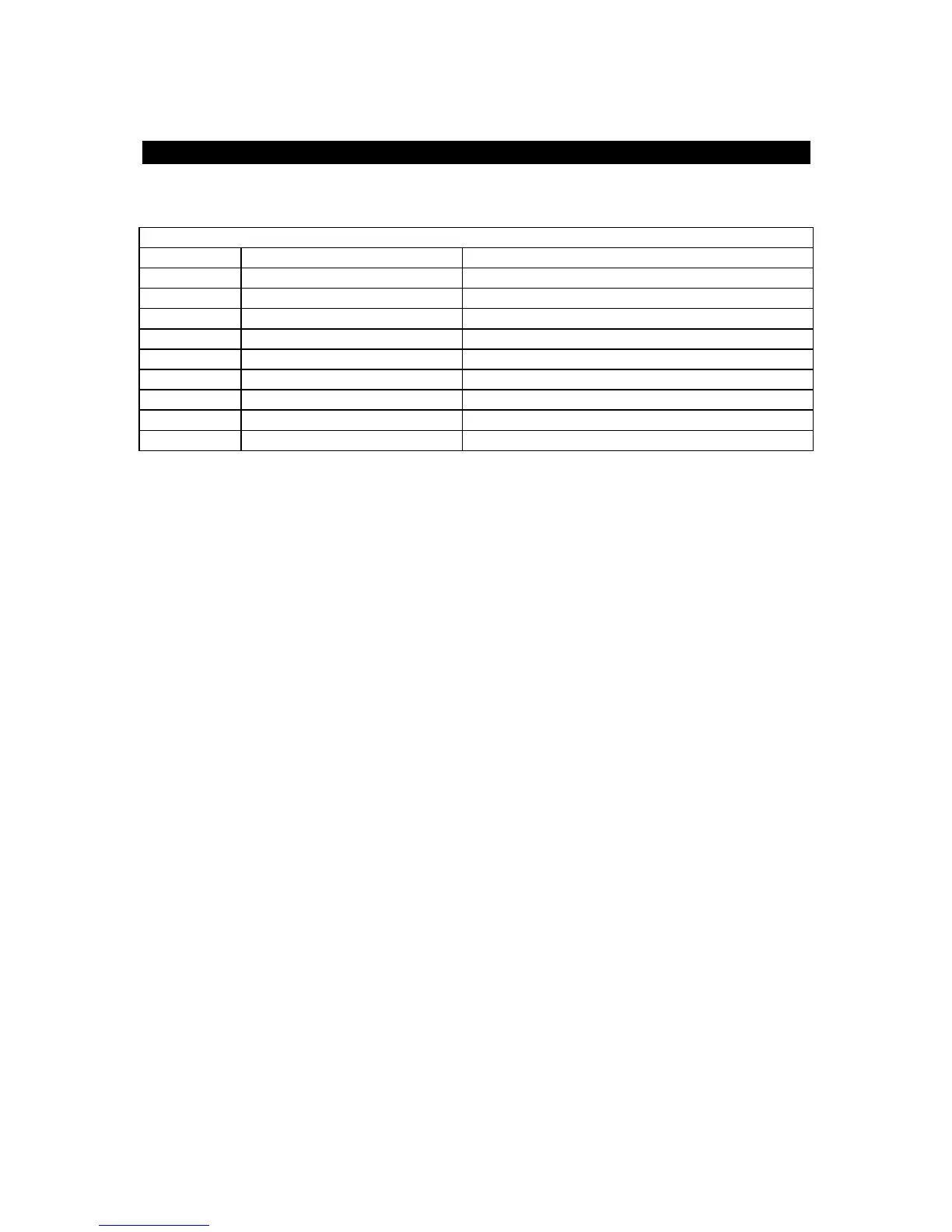
CAN BUS CONNECTOR
N. Pin Signal Description
1 n.c.
2 CAN_L Line of communication low
3 CAN_GND Ground
4 n.c.
5 CAN_SHLD Shield
6 GND Ground
7 CAN_H Line of communication high
8 n.c.
9 n.c.
Two application layers are available for the Can interface.
The first is SBCCAN, which enables master/slave communication, as well as slave/slave
communication. It includes synchronism telegrams, transmissions to slave groups, and cyclic,
acyclic, and interrupt transmissions. There is also a subset of SBCCAN which allows for simple
data exchange between SBC drives (IDC inter-drive communication).
The second is DeviceNet. With the DeviceNet interface implemented, the EC-4 is seen by the master
as a remote I/O module with 256 inputs and 256 outputs. Obviously, the I/Os are virtual.
Interpretation of the meaning of the I/Os will be defined by the program installed on the EC-4
board.
 Loading...
Loading...








