Connections to Control Concepts: Rover Vehicle
Prof. R. H. Bishop
University of South Florida
The rover vehicle assembly provides insight into two feedback control system concepts: (i) openloop control to a
reference input and (ii) closed-loop feedback control to track a predetermined path.
A. Demonstrating open-loop control
Open-loop control utilizes an actuator and a controller to command the plant directly without using feedback. In this
case, the rover vehicle and two geared, DC motor-driven wheels serve as the plant and actuators, respectively. The
commands enter the control system via the host computer through front panel commands sent over the network
connection to the myRIO which hosts the motor control code. Students may add PID code to control the plant’s
position or velocity. The main benefit of openloop control is reduced overall complexity—meaning that the additional
challenges associated with introducing sensors and feedback loops are avoided. However, the open-loop control
system is highly sensitive to external disturbances, represented by Td(s), and to both knowledge of and changes in
the parameters of the plant, represented by G(s). Therefore, open-loop control does not address key design issues in
feedback control of disturbance reduction and robustness. For example, when commanded to ‘turn right’, the open-
loop control system may indeed turn the rover, but in the presence of external disturbances, the rover may not turn at
an acceptable rate and the final direction may not be acceptable. The open-loop control system performance can be
tuned by adjusting the PID controller gains.
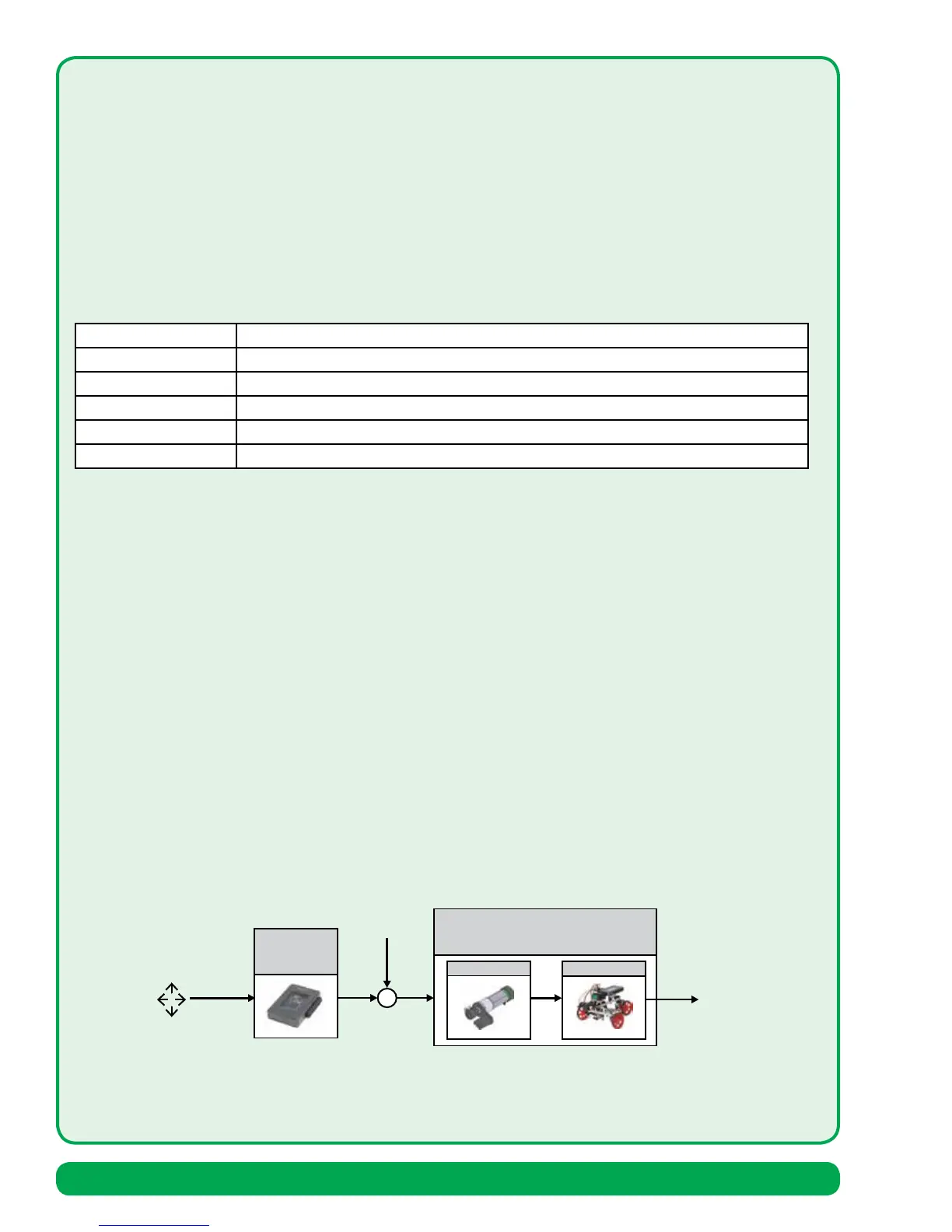
Figure 1 Open loop control with external disturbances.
Plant Rover vehicle
Sensor None
Actuator DC servo motors
Performance Command following
Design objectives Tune the control system by adjusting PID gain constants
Reference inputs External commands to turn right, left, back, forward
Plant
Controller
G
c
(s)
G(s)
Actuator
Rover
Reference
Input
T
d
(s)
80 Rover Vehicle Assembly