Page 67 of 254
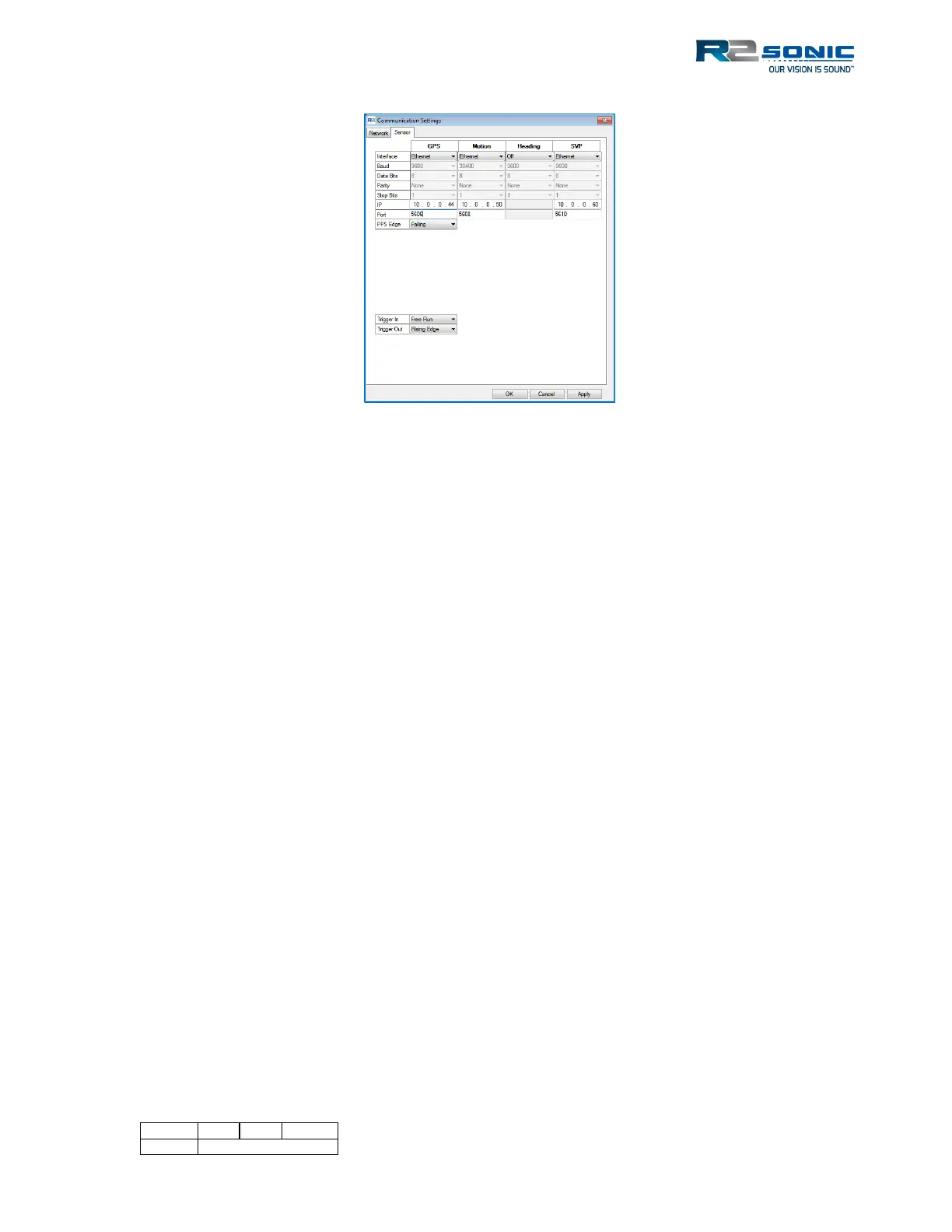
Figure 54: Sensor Ethernet communications settings
5.5.2 GPS
The GPS input is for the ZDA time message ($GPZDA) or Trimble UTC message; other NMEA
messages may be in the same string; it is not necessary to isolate the ZDA or UTC. In the GPS
receiver’s operation manual, there will be an entry that will detail which edge of the PPS pulse is
used for synchronisation; this will be either synch on the rising edge or synch on the falling edge.
Selecting the correct polarity is vital for correct timing.
The firmware supports the ZDA integer part (HHMMSS) and accepts PPS pulses if they pass a basic
stability test: the last two pulses must be within 200ppm. If the PPS is unstable or absent, the SIM's
internal trained clock runs with a high degree of accuracy.
The decoded time, from the bathymetry packet, is visible in the main display on the lower left along
with the cursor position information. If the displayed time and date is 01/01/1970, it indicates that
timing is not set up correctly.
5.5.3 Motion
The motion data is used for roll stabilisation. There are three accepted formats: TSS1, iXSea
$PHOCT, or CDL’s MiniPOS3. All formats are accepted on serial or Ethernet.
For serial input, the motion data should be at the highest possible baud rate, with the motion sensor
configured for the highest output possible, at a minimum 100Hz update.
5.5.4 Heading
Not currently enabled.
5.5.5 SVP
This is used to set the communication for the sound velocity probe mounted on the sonar head.