reachrobotics.com
info@reachrobotics.com | +61 (2) 9519 7651
4
This section describes the necessary safety information and precautions relevant to the setup and operation of the Reach
Bravo manipulator system. To ensure correct and safe use of Reach Robotics manipulators, carefully read this section and
make yourself well acquainted with the contents. Follow any warnings and cautions included. In conjunction with this manual, it
is important that the users have knowledge of safety considerations and make correct judgments on safety procedures during
operation.
Reach Bravo manipulators are highly dexterous, electromechanical devices that can move with a high degree of freedom.
Failure to take necessary safety measures or mishandling due to not following the instructions in this technical supplement
may result in damage to the robot or injury to personnel.
1 SAFETY INFORMATION
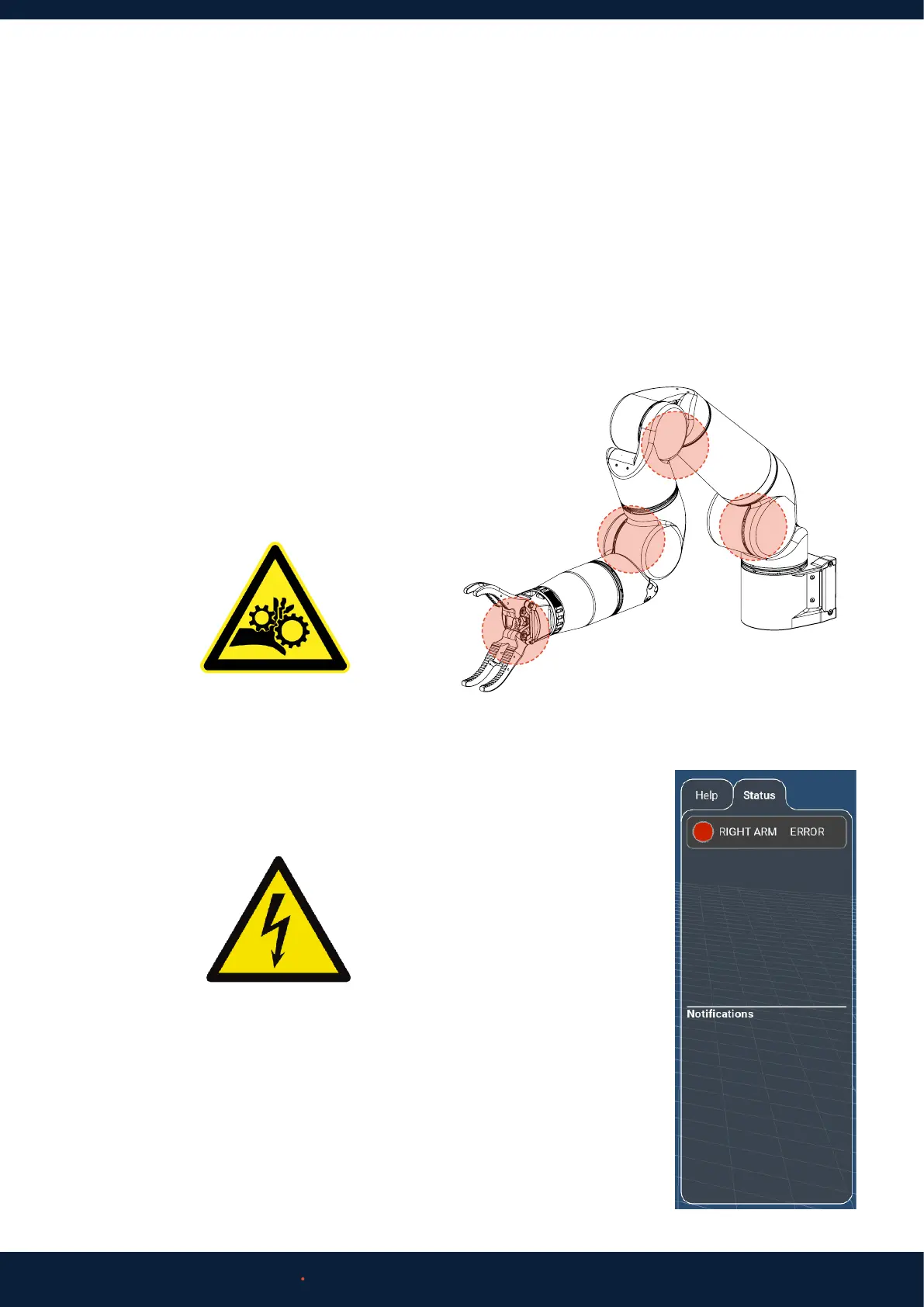
1.1 CRUSH POINTS AND COLLISION HAZARDS
1.2 SHOCK HAZARD
1.3 LEAK DETECTION
There should be no attempt made to remove the external housing of the manipulator to
expose the internal circuitry. Doing so could cause injury or fatality by electrical shock.
If there is a breach in the vacuum, an error will be received and the status tab in the help
menu of Reach Control will open.
To view more details of the error, click on the product button. This will open the health
panel.
Crush hazards exist on the Reach Bravo in locations where
two limbs can compress together as well as in the jaws of the
grabber stage of the manipulator. It is important that the operator
ensures the working area of the manipulator is clear prior to
operation.