30
PICS stop signal
8 PICS stop signal
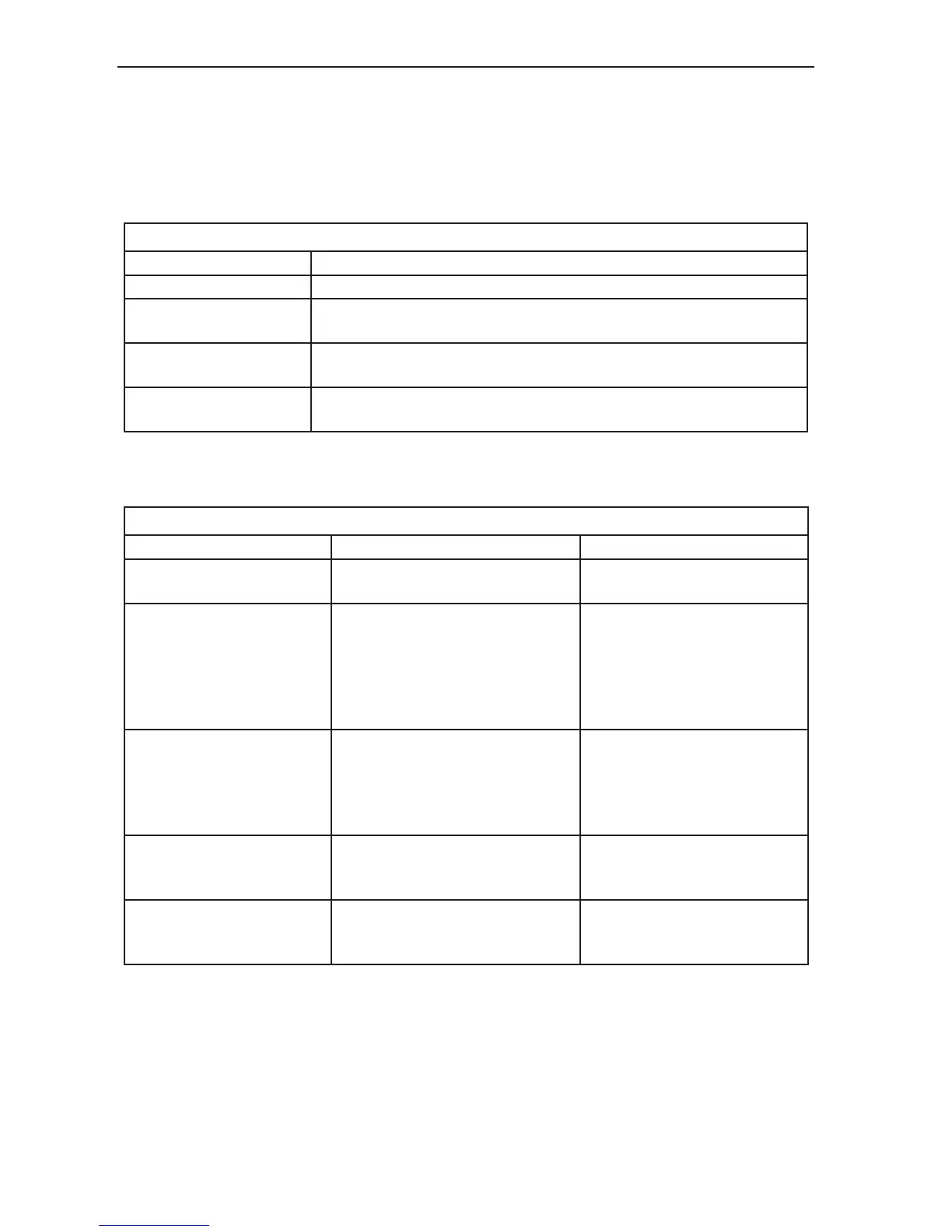
The PHC10-2 will assert STOP under the following conditions (table 19):
Table 19 - PHC10-2 LEDs
Condition Notes
Overload error The head has been overloaded while locked, causing it to unlock.
Obstruct error
The head has been obstructed while moving to the requested position and
is unable to reach that position, or is unable to lock into it.
Head disconnect
STOP will be asserted for two seconds if the head is disconnected. It is
reset after this period.
Power failure
Because STOP is an active low signal, it will effectively be asserted if
mains power is removed from the PHC10-2.
The reaction to assertion of PICS STOP to the system and effect of the signal removal are set out in
table 20.
Table 20
System state Reaction Removal of external STOP
STOP asserted on power up.
Head locked.
Normal system start up. Head will
report its position.
Head movement commands
accepted.
System in manual mode.
Manual movement initiated by
HCU1 after STOP asserted.
Single step manual movement only.
Continuous movement disabled.
Head can be moved slowly as a
‘safeguard movement’. Head will lock
up as normal when movement key
released.
Continuous movement enabled.
System in manual mode.
STOP asserted during manual
move by HCU1.
Continuous head movement
immediately disabled. Head will
continue to move in single steps.
Head will lock up as normal when
movement key released.
Continuous movement enabled.
System in automatic mode.
STOP asserted before update
command received.
PHC10-2 will not unlock or index the
head.
Normal system operation
resumed.
System in automatic mode.
STOP asserted during a head
move.
Power immediately removed from
axis motors. Motors braked.
An update command will cause
the head to complete its move.