CANopen Interface
36 CANBus Networking Manual V2.0 July 8, 2019
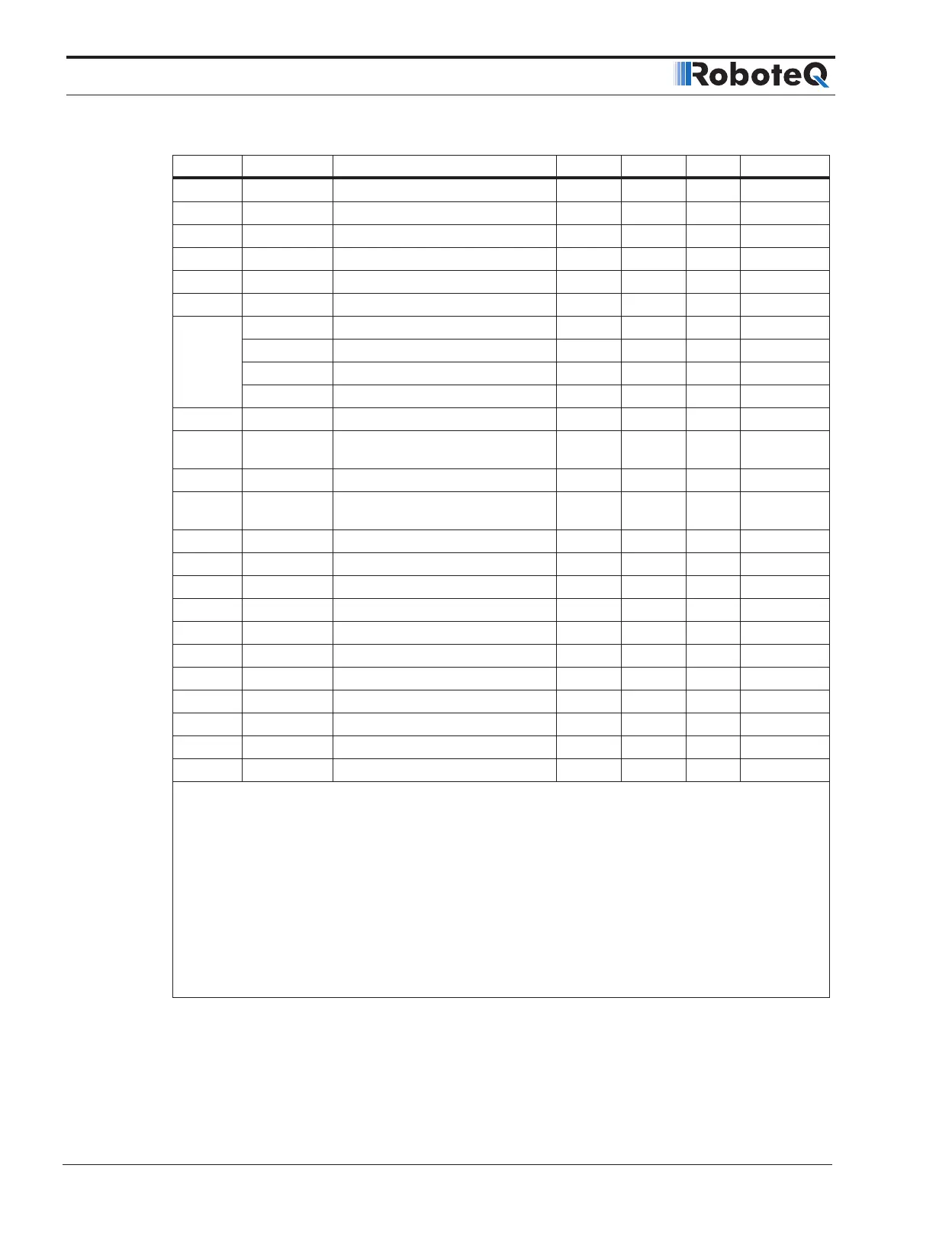
Index Sub (hex) Entry Name Type Access PDO Command
0x2125 01-mm(1) Read Destination Tracking S32 RO Ye s TR
0x2132 01-mm(1) Read Rotor Angle S16 RO Ye s ANG
0x2133 00 Read Script Checksum U32 RO Ye s SCC
0x2134 00 Read Node Is Alive U8 RO Ye s ICL
0x2135 01-mm(1) Read FOC Angle Correction S16 RO Ye s FC
0x2136 01-ii(9) Read AC Induction Slip S16 RO Ye s SL
0x2137 01 Read Firmware Version U16 RO Ye s FIN
02 Read Firmware Month U16 RO Ye s FIN
03 Read Firmware Day U16 RO Ye s FIN
04 Read Firmware Year U16 RO Ye s FIN
0x2138 01-mg(8) Read MagSensor Cross Tape U8 RO Ye s MGX
0x213A 00 Read BMS Battery’s State of
Charge
U8 RO Ye s BSC
0x213C 01-si(10) Read SSI Sensor Motor Speed S32 RO Ye s SS
0x213D 01-si(10) Read Relative SSI Sensor Motor
Speed
S16 RO Ye s SSR
0x213E 01-si(10) Read SSI Absolute Counter S32 RO Ye s CSS
0x213F 01-si(10) Read SSI Relative Counter S32 RO Ye s CSR
0x2141 00 Read BMS State of Charge U8 RO Ye s BMC
0x2142 00 Read BMS Status Flags U8 RO Ye s BMF
0x2143 00 Read BMS Operational State U8 RO Ye s BMS
0x2145 01-13 Read Digital Inputs BOOL RO Ye s DI
0x2146 01-di(11) Read Analog Inputs S16 RO Ye s AI
0x2147 01-di(11) Read Analog Inputs Converted S16 RO Ye s AIC
0x2148 01-pi(11) Read Pulse Inputs U16 RO Ye s PI
0x2149 01-pi(11) Read Pulse Inputs Converted S16 RO Ye s PIC
0x214A 01-fs(11) Read FlowSensor S32 RO Ye s FLW
(1) mm: Maximum number of motors.
(2) ee: Maximum number of encoders.
(3) vv: Maximum number of integer variables.
(4) bb: Maximum number of boolean variables.
(5) tt: Maximum number of internal temperature sensors.
(6) kk: Maximum number of spectrum radio.
(7) ma: Maximum number of MEMS accelerometers.
(8) mg: Maximum number of magnetic sensors.
(9) ii: Maximum number of AC induction motors.
(10) si: Maximum number of SSI sensors.
(11) di: Maximum number of digital inputs.
(12) pi: Maximum number of pulse inputs.
(13) fs: Maximum number of flow sensors.
 Loading...
Loading...
