CAN Networking on Roboteq Controllers
48 CANBus Networking Manual V2.0 July 8, 2019
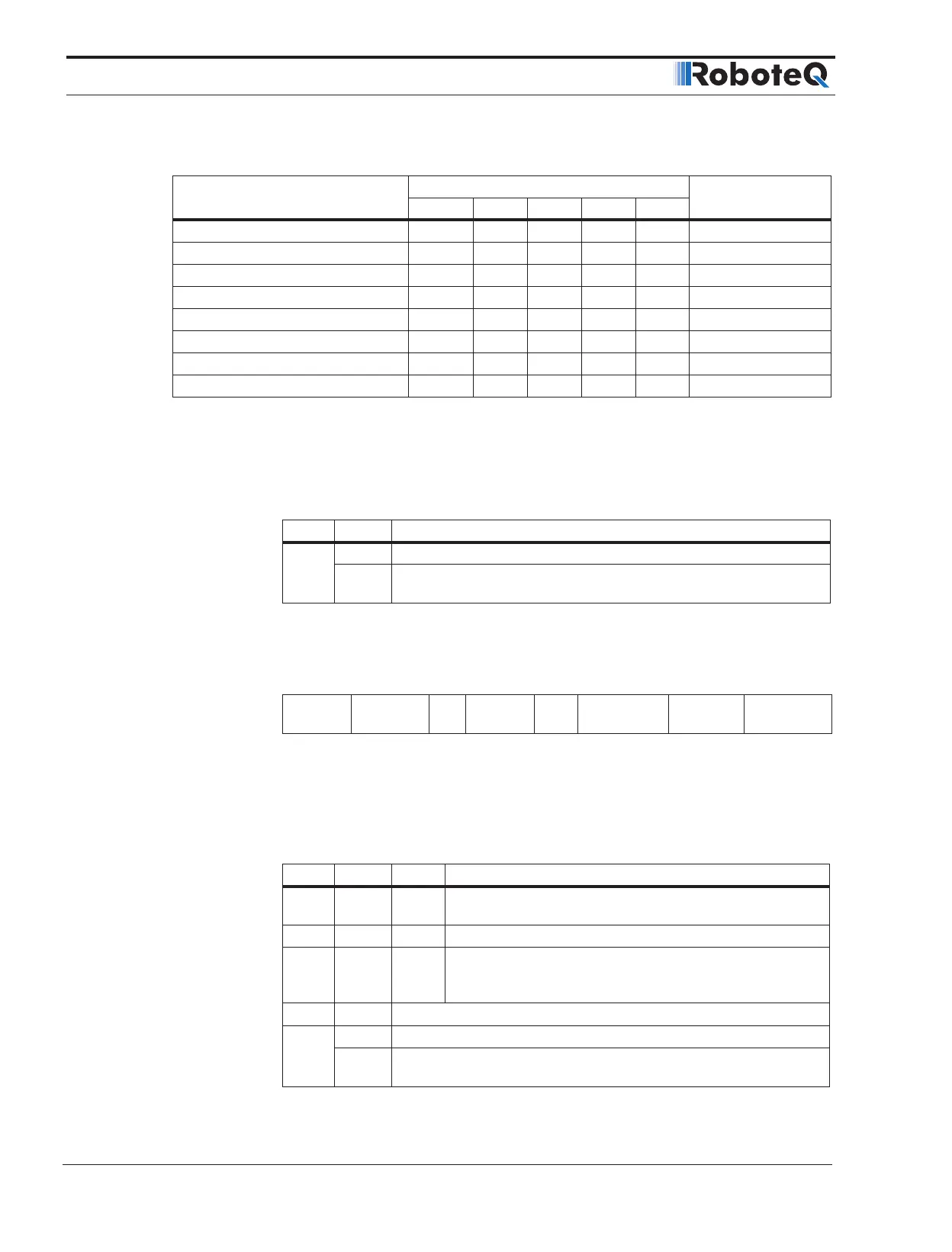
TABLE 4-6. Command Coding
Command
Bits of the Control Word
TransitionBit 7 Bit 3 Bit 2 Bit 1 Bit 0
Shutdown 0 X 1 1 1 2,6,8
Switch On 0 0 1 1 1 3
Switch On + Enable Operation 0 1 1 1 1 3+4
Disable Voltage 0 X X 0 X 7,9,10,12
Quick Stop 0 X 0 1 X 7,10,11
Disable Operation 0 0 1 1 1 5
Enable Operation 0 1 1 1 1 4,16
Fault Reset 0->1 X X X X 15
Bits 9, 6, 5, and 4 of the ControlWord are operation mode specific. The halt function (bit
8) behavior is operation mode specific. If the bit is 1, the commanded motion shall be
interrupted, After releasing the halt function, the commanded motion shall be continued if
possible, see Table 4-7.
TABLE 4-7. Halt bit (bit 8)
Bit Value Definition
8
0 Positioning shall be executed or continued
1
Axis shall be stopped. Slow down on quick stop ramp (EDEC) and
stay in operation enabled
Profile Position Mode
TABLE 4-8. control word mapping in profile position mode
15 10 9 8 7 6 5 4 3 0
see
Table 4-4
Change on
set-point
Halt
see
Table 4-4
Abs/
rel
Change Set
Immediately
New Set
Point
see Table 4
MSB LSB
In Profile Position Mode the operation specific bits are mapped in Table 4-8. With bits 4, 5
and 9, user can define when the command for next Position (0x607A - POS) will be pro-
cessed. Bit 6 defines whether the command is absolute or relative to the current position.
Table 4-9. Definition of bits 4,5,6 and 9 in profile position Mode
Bit 9 Bit 5 Bit 4 Definition
0 0 0->1
Positioning shall be completed (target reached) before the
next one gets started.
X 1 0->1 Next positioning shall be started immediately
1 0 0->1
Positioning with the current profile velocity up to the current
set-point shall be proceeded and then next positioning shall
be applied
Bit Value Definition
6
0 Target position shall be an absolute value
1
Target position shall be a relative value. Positioning moves shall be
performed relative to the preceding (internal absolute) target position
 Loading...
Loading...
