Robotiq Hand-E Gripper Instruction Manual
Control using registers
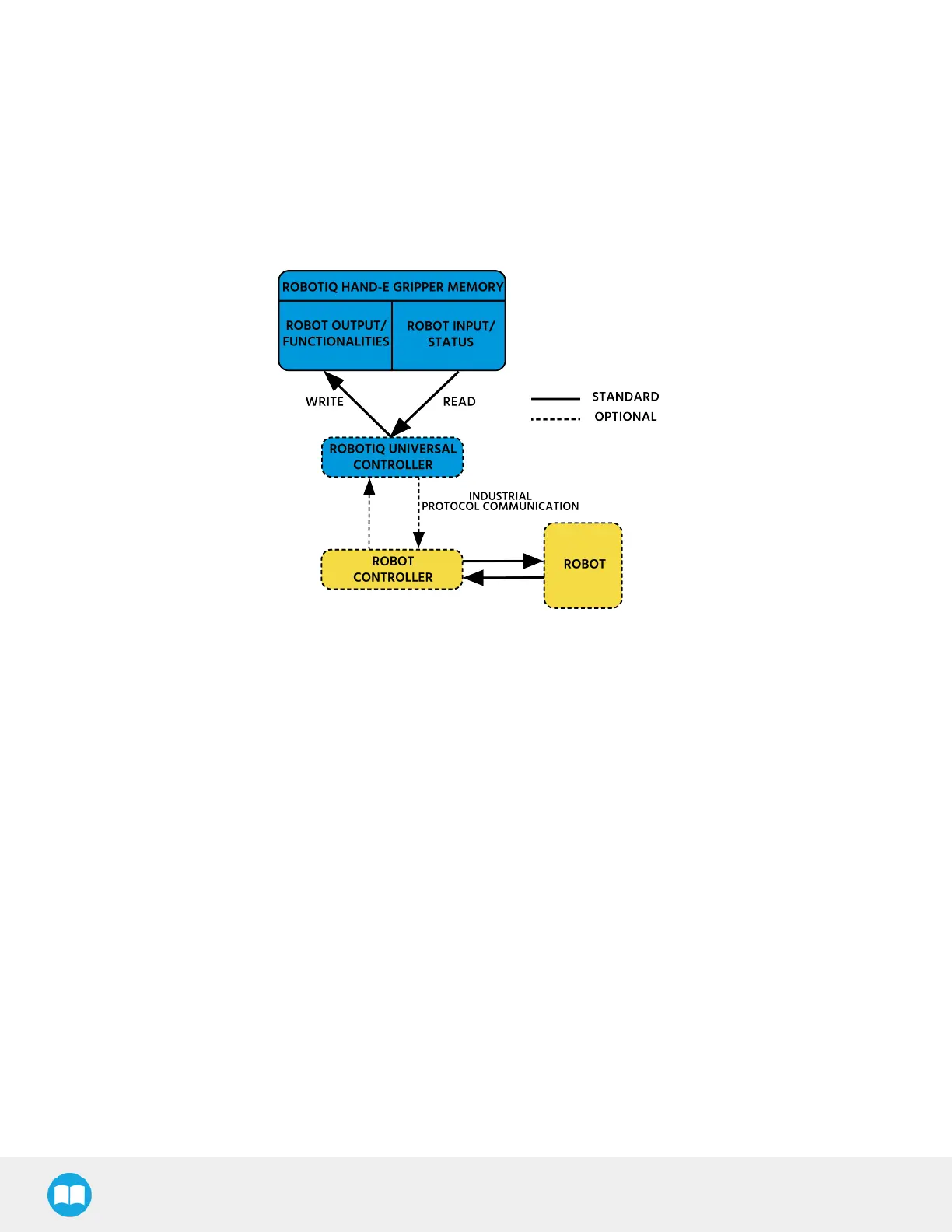
Grippers share their internal memory with a robot controller. One part of the memory is for the robot output; gripper functionalities. The
other part of the memory is for the robot input; gripper status. Two types of actions are then available to a robot controller:
1. Write in the robot output registers to activate functionalities;
2. Read in the robot input registers to get the status of the gripper.
The Gripper Register Mapping section maps the registers used to control the gripper or to read its status while the Robot Output
Registers &Functionalities section details the output (write) register functions, and Robot Input Registers andStatus section details the
input (read) register status. The figure below is a representation of the memory and the control logic of the gripper. For details, see the
Control Logic Example section
Fig. 4-1: Hand-E control logic overview
44