Robotiq Hand-E Gripper Instruction Manual
3.7. Installation for Universal Robots
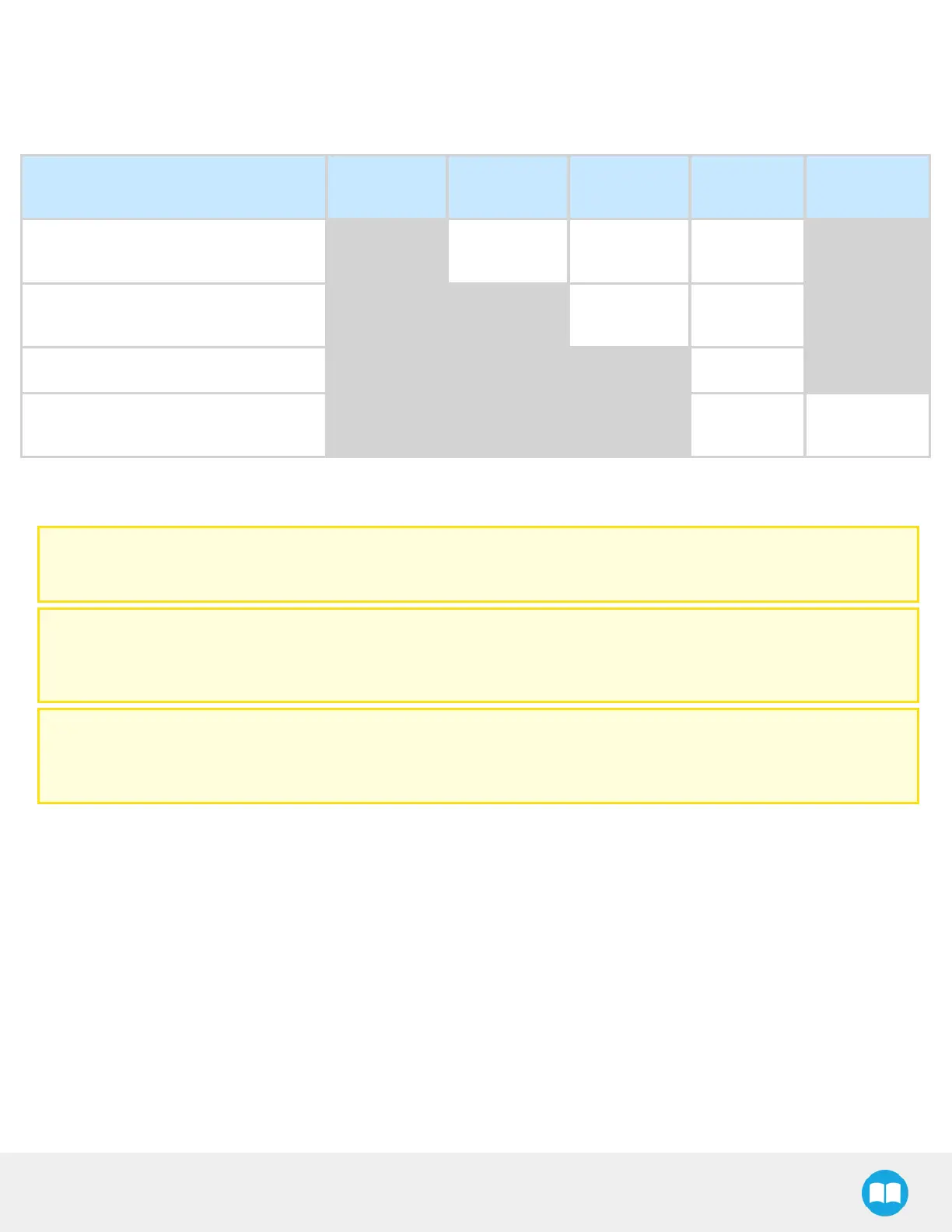
The table below shows which Robotiq software to use with your Universal Robots' controller. If you are using a CB3, CB3.1 or e-Series
controller, it is recommended to use the Robotiq Grippers URCap Package.
Robotiq Software
Controller
CB1
Controller
CB2
Controller
CB3
Controller
CB3.1
e-Series
Controller
Driver Package
(includes Gripper toolbar)
Incompatible Compatible Compatible Compatible Incompatible
Robotiq Grippers URCap Package 1.2.1
and earlier versions
Incompatible Incompatible Compatible Compatible Incompatible
Robotiq Grippers URCap Package 1.3.0 Incompatible Incompatible Incompatible Compatible Incompatible
Robotiq Grippers URCap Package 1.3.1
and later versions
Incompatible Incompatible Incompatible Compatible Compatible
Table 3-5: Compatibility between Robotiq software and robot controller
Refer to the URCap Package section for the installation of the UR software package for Hand-E.
Caution
The robot's PolyScope version must be 3.5 or later in order to install the URCap.
Caution
Prior to use over Universal Robots, adjust the payload and the center of gravity from the Installation tab (refer to the
Mechanical Specifications section).
Caution
Please refer to the Installing URCap Package section to configure the grippers properly before controlling and programming
them.
33