Robotiq Hand-E Gripper Instruction Manual
5.2. Mechanical Specifications
5.2.1. Hand-E Assembly
Info
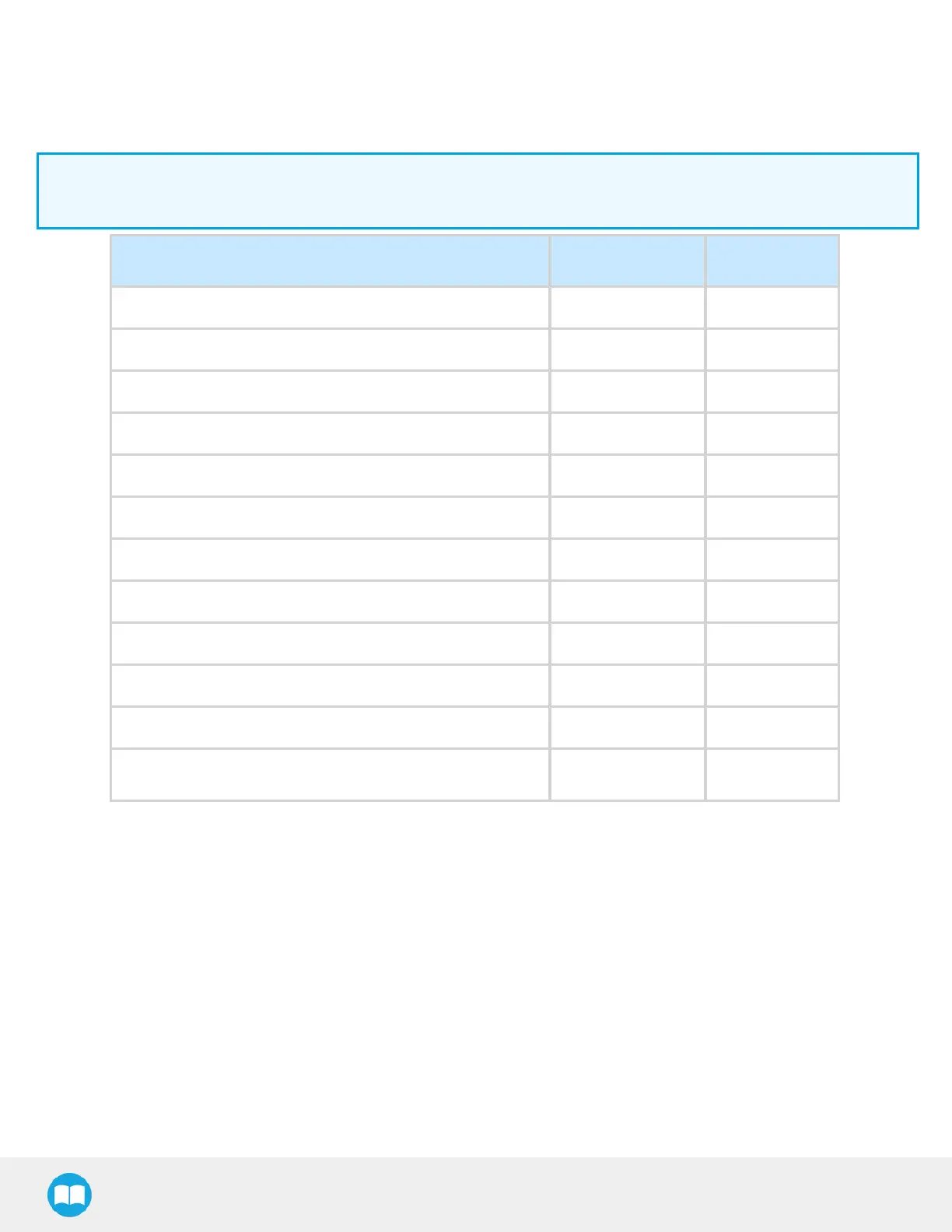
Data shown in the table below is typical for new products, and will vary with use.
Specification Metric Imperial
Stroke 50 mm 1.97 in
Maximum recommended payload - Form-fit grasp 5 kg 11 lbs
Maximum recommended payload - Friction grasp 4.7 kg 10.3 lbs
Height - No fingertip 112 mm 4.41 in
Height - With fingertips 157 mm 6.18 in
Diameter 75 mm 2.95 in
Weight (with coupling) 1070 g 2.3 lbs
Grip force 20 N - 185 N 4.5 lbf - 41 lbf
Finger speed 20 - 150 mm/sec 0.8 - 5.9 in/sec
Position repeatability
1
0.025 mm 0.001 in
Position resolution
2
0.2 mm 0.008 in
Minimum part detection
0.5 mm 0.02 in
1
Repeatability is defined as the positional deviation resulting from the average displacement determined when picking an object using
standard aluminium fingertips. For more details see the blog.robotiq.com article on repeatability. Position repeatability varies
depending on the product wear and operating conditions. The presented values are typical for the newlymanufactured products.
2
Resolution is the increment modified from a 1 bit difference of position/speed/force request (from 0 to 255).
Table 5-1: Mechanical specifications of the Hand-E Gripper fitted with coupling GRP-CPL-062 and aluminum fingertips (without NBR).
108