Robotiq Hand-E Gripper Instruction Manual
3.5. Electrical Setup
Power and communication are established with the Hand-E Gripper via a single device cable. The device cable provides a 24V power
supply to the gripper and enables serial RS485 communication to the robot controller.
Info
RS485 signals (485+, 485- and 485 GND) are isolated from the main 24V power supply. GND can be connected to any other
ground reference as long as the voltage potential between the grounds does not exceed 250V. Grounding reference is at the
user's discretion.
3.5.1. Electrostatic Discharge Safety
Robotiq Hand-E Gripper is not ESD safe. If installed properly using the tooth lock washers, the casing and internal mechanism are
grounded through the screws used to mount the gripper on the coupling. The same is true for the coupling. For the Hand-E Gripper,
the top part mounted on the casing using 6 screws, the fingertips and rails are isolated from the rest of the gripper. It is therefore not
possible to discharge any electrostatic charge that would build up on the part through the gripper.
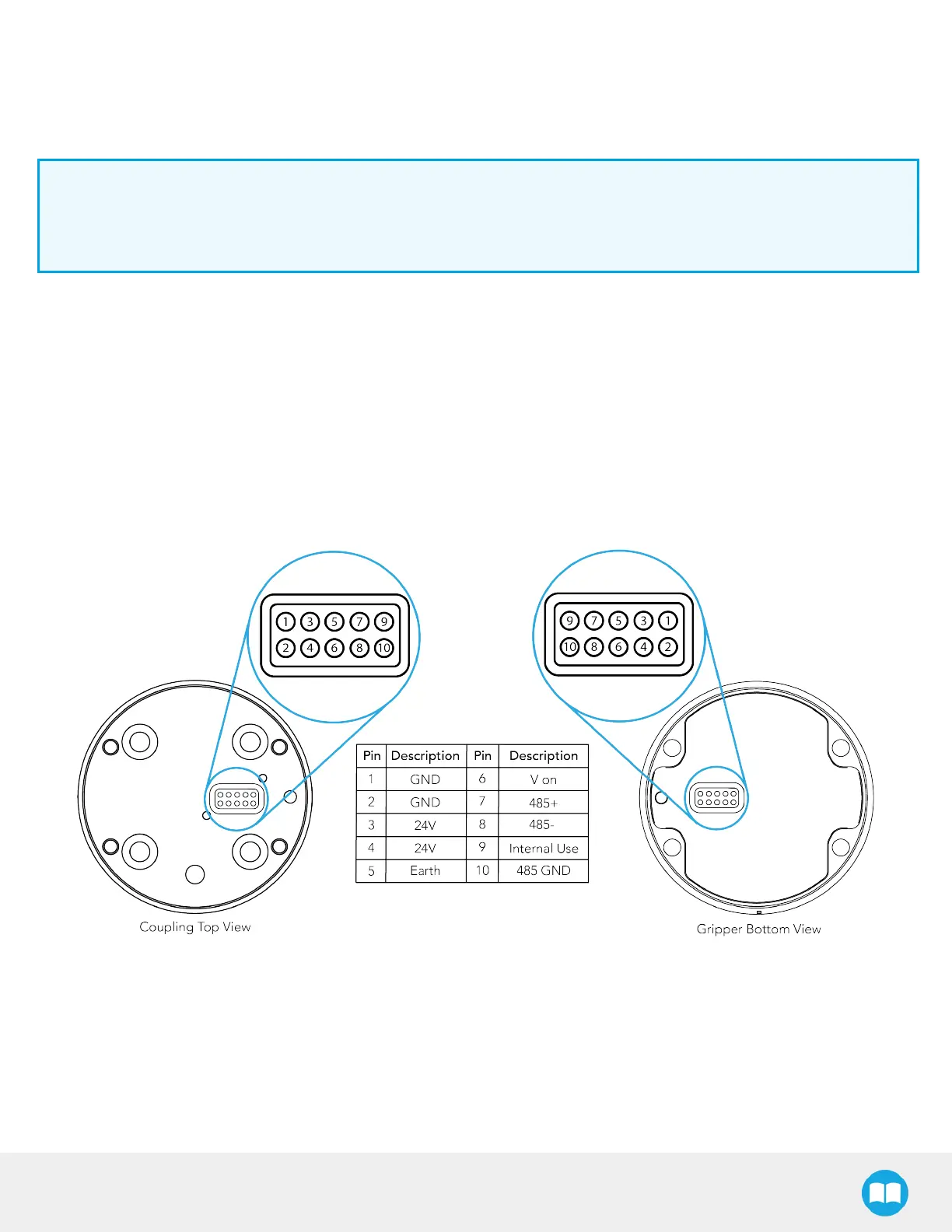
3.5.2. Pinout Interface
The gripper interfaces with its coupling via a 10-spring pin connector located on its outer surface.
Fig. 3-9: Pinout to the Hand-E Gripper cable-to-wrist coupling.
27